Cette page fournit une simple interface de navigation pour trouver des entités décrites par une propriété et une valeur nommée. D’autres interfaces de recherche disponibles comprennent la page recherche de propriété, et le constructeur de requêtes ask.
Liste de résultats
- Item:Tuyau + (Conduit à section circulaire destiné à faire passer un liquide, un gaz.)
- Item:Afficheur LCD + (===Composition chimique===<br />Un c … ===Composition chimique===
Un cristaux liquide est produit de la chimie organique, qui possède les propriétés optiques des cristaux solides alors qu'il est lui-même liquide. Ses molécules ont la forme de cigares susceptibles de s'orienter très rapidement dans le sens de tout champs électriques qu'on lui applique. En l'absence de ce dernier, les molécules s'orientent aléatoirement dans toutes les directions.
===Propriétés===
L'afficheur LCD utilise la polarisation de la lumière, grâce à des filtres polarisants et à la biréfringence de certains cristaux liquides en phase nématique (phase intermédiaire entre liquide et solide), dont on peut faire varier l'orientation en fonction du champ électrique. Du point de vue optique, l'afficheur à cristaux liquides est un dispositif passif (il n'émet pas de la lumière) dont la transparence varie. Il doit donc être éclairé.
==Caractéristiques : ==
Il existe plusieurs modèles d'afficheurs Les modèles fonctionnant en I2C ou les modèles simples (où le câblage est plus complexe) cependant, il est possible d'ajouter un module I2C permettant de transformer votre afficheur.)
- Item:Sucre + (<nowiki>== Composition chimique ==&l …
== Composition chimique == )
Le sucre est une molécule composé de carbone d'hydrogène et d'oxygène.
La formule chimique du sucre est : C12H22 O11.
Le sucre est en fait la saccharose, une molécule organique constituée d'une molécule de fructose et d'une molécule de glucose.
== [[http://www.wikidebrouillard.org/index.php?title=Sucre&action=edit§ion=4 modifier]] Propriétés ==
• Un cristal de sucre fond à environ 186°C
• Le sucre est très soluble dans l'eau exemple: dans 100g (=10cl) d'eau on peut dissoudre 200g de sucre. et cette quantité peut augmenter lorsque la température augmente.
• Le sucre relève le goût
• Il renforce nos perceptions.
== [[http://www.wikidebrouillard.org/index.php?title=Sucre&action=edit§ion=5 modifier]] Expériences qui utilisent ce matériel ==
=== [[http://www.wikidebrouillard.org/index.php?title=Sucre&action=edit§ion=6 modifier]] Sur le Wikidébrouillard ===
[http://www.wikidebrouillard.org/index.php?title=Combustion_du_sucre Combustion du sucre]
=== [[http://www.wikidebrouillard.org/index.php?title=Sucre&action=edit§ion=7 modifier]] Autres expériences utilisant ce matériel ===
Du sucre, de l'eau et ...un soleil.
Concept: dissolution,mouvement des molécules
www.je-comprends-enfin.fr/index.php?/Expériences/du-sucre-de-lencreet-un-soleil/id-menu-23.html [http://www.je-comprends-enfin.fr/index.php?/Expériences/du-sucre-de-lencreet-un-soleil/id-menu-23.html [1]]
== [[http://www.wikidebrouillard.org/index.php?title=Sucre&action=edit§ion=8 modifier]] Où le trouver facilement ? ==
On l'achète en poudre ou en morceau dans n'importe quel magasin alimentaire. Il était autrefois extrait de la canne à sucre cultivée dans un climat tropicale mais aujourd'hui on l'extrait plus souvent de la betterave.
== [[http://www.wikidebrouillard.org/index.php?title=Sucre&action=edit§ion=9 modifier]] Utilisations dans la vie quotidienne ==
Le sucre est un condiment très utilisé en cuisine essentiellement en pâtisserie (dans les confitures, les gâteaux etc).
Sa particularité, est de donné un "bon goût" aux aliments et d'être très énergétique pour les cellules des organismes vivants.
== [[http://www.wikidebrouillard.org/index.php?title=Sucre&action=edit§ion=10 modifier]] Plus d'informations sur Sucre ==
• Excellent conservateur naturel
• Fermenté on en fait de l'alcool (exemple rhum: mélasse+sucre de canne)
• Le sucre fournit le glucose, nécessaire au cerveau pour fonctionner
• Carburant de notre corps, il ne faut pas en abuser et faire de l'exercice
• Chez les enfants le sucre les rend plus attentifs. - Item:Récepteur GPS + (<nowiki>== Composition ==<br /> …
== Composition == )
Un récepteur GPS est composé d'une antenne qui capte les signaux des satellites. Ces signaux sont ensuite filtrés afin de retirer les parasites et amplifiés afin d'être plus compréhensibles par le processeur qui va les utiliser pour calculer la position du récepteur. Les informations de positionnements sont ensuite utilisés pour être afficher sur un écran, dans la plus part des cas, ou être envoyé vers d'autres systèmes.
== [[http://www.wikidebrouillard.org/index.php?title=R%C3%A9cepteur_GPS&action=edit§ion=3 modifier]] Propriétés ==
== [[http://www.wikidebrouillard.org/index.php?title=R%C3%A9cepteur_GPS&action=edit§ion=4 modifier]] Expériences scientifiques avec Récepteur GPS ==
== [[http://www.wikidebrouillard.org/index.php?title=R%C3%A9cepteur_GPS&action=edit§ion=5 modifier]] Où le trouver facilement ? ==
Désormais on peut trouver des récepteurs GPS dans de nombreux objets de la vie quotidienne (téléphone portable, automobile, appareil photo, ...) ou dans des appareils plus spécialisés(GPS de randonnées, robot d'exploration, ...)
== [[http://www.wikidebrouillard.org/index.php?title=R%C3%A9cepteur_GPS&action=edit§ion=6 modifier]] Utilisations dans la vie quotidienne ==
Dans la vie quotidienne, les récepteurs GPS permettent à n'importe qui de connaitre sa position, que ce soit en plein désert comme au centre d'une des grandes villes qui peuplent notre planète et de se diriger vers une destination choisie. On s'en sert pour trouver un restaurant, un point d'information, une adresse ou même la sortie du dit désert.
== [[http://www.wikidebrouillard.org/index.php?title=R%C3%A9cepteur_GPS&action=edit§ion=7 modifier]] Plus d'informations sur Récepteur GPS ==
Les récepteurs GPS fonctionnent partout du moment qu'ils peuvent voir les satellites. On ne peut pas par exemple s'en servir pour sortir d'une grotte !!
== [[http://www.wikidebrouillard.org/index.php?title=R%C3%A9cepteur_GPS&action=edit§ion=8 modifier]] Bibliographie ==
Global Positioning System Wikipédia : [http://fr.wikipedia.org/wiki/Global_Positioning_System [1]] Récepteur GPS Wikipédia : [http://fr.wikipedia.org/wiki/R%C3%A9cepteur_GPS [2]] - Item:Capteur de qualité de l'air BME 680 + (<nowiki>==Principe : ==<br />C …
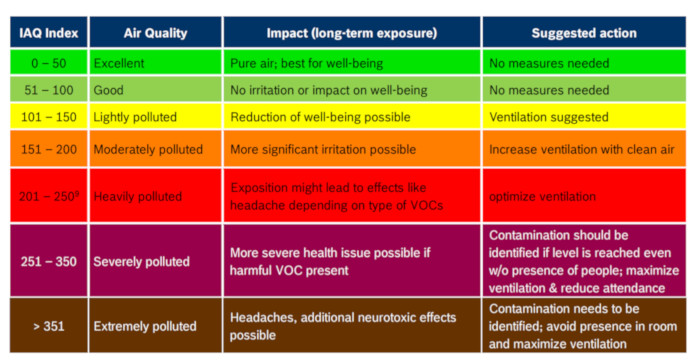
==Principe : == _de_lair_BME_680_Capture_decran_du_2022-01-20_14-22-06.png" class="image"><img alt="Item-Capteur de qualite de lair BME 680 Capture decran du 2022-01-20 14-22-06.png" src="/images/2/27/Item-Capteur_de_qualite_de_lair_BME_680_Capture_decran_du_2022-01-20_14-22-06.png" width="895" height="255" data-file-width="895" data-file-height="255" /></a></div></div></span></div>Voici les indices de qualité de l'air intérieur en fonction de la résistance obtenue :<br /><br/><div class="annotatedImageDiv" typeof="Image" data-resource="Fichier:Item-Capteur de qualite de lair BME 680 Iaq table 700.jpg" data-sourceimage="https://www.wikidebrouillard.org/images/b/b4/Item-Capteur_de_qualite_de_lair_BME_680_Iaq_table_700.jpg"><span ><div class="center"><div class="floatnone"><a href="/wiki/Fichier:Item-Capteur_de_qualite_de_lair_BME_680_Iaq_table_700.jpg" class="image"><img alt="Item-Capteur de qualite de lair BME 680 Capture decran du 2022-01-20 14-16-04.png" src="/images/b/b4/Item-Capteur_de_qualite_de_lair_BME_680_Iaq_table_700.jpg" width="700" height="364" data-file-width="700" data-file-height="364" /></a></div></div></span></div><br/></nowiki>)
Ce module permet la mesure de 4 paramètres différents liés à la qualité de l'air :
*la '''température''' ;
*'''l'humidité''' ;
*la '''pression atmosphérique''' ;
*la '''concentration en composés organiques volatils''' (COV) via un capteur MOx, qui contient une couche sensible semi-conductrice (oxydes métalliques) dont la conductivité est dépendante de la composition de l’air qui l’entoure. Le signal obtenu correspond donc à une résistance variable en fonction de l’évolution de la conductivité liée à la teneur en gaz COV.
==Caractéristiques : ==Généralités Alimentation 3 à 5 Vcc Interface I2C et SPI sur connecteur au pas de 2,54 mm Dimensions 30 x 14 x 10 mm Poids 10 g Température Plage de mesure - 40 à 85 °C Humidité Plage de mesure 0 à 100 % RH Précision relative ± 3 % RH Temps de réponse 8 sec Pression atmosphérique Plage de mesure 300 à 1100 hPa Précision absolue ± 1 hPa Qualité de l'air (IAQ) Plage de mesure 0 à 500 (valeur de résistance) Temps de réponse 1 sec
Documentation complète du capteur : https://cdn-shop.adafruit.com/product-files/3660/BME680.pdf
==Bibliothèque : ==
Pour utiliser facilement ce capteur, nous vous conseillons d'utiliser la bibliothèque BSEC du constructeur BOSH [https://www.bosch-sensortec.com/software-tools/software/bsec/ (https://www.bosch-sensortec.com/software-tools/software/bsec/]), présente dans le gestionnaire de bibliothèques Arduino.Cette bibliothèque permet d'obtenir des mesures plus fiables grâce à son algorythme de calculs intégrés, elle permet aussi de mesurer la qualité de l'air intérieur, contrairement aux autres bibliothèques. Plus d'infos pour [[Importer des bibliothèques dans l'interface Arduino]].
'''Attention,''' cette bibliothèque n'est pas opensource est est soumise à un copyright. Bosh ne fournit pas les calculs pour obtenir l'indice de qualité de l'air, nous sommes donc obligés de passer par cette bibiothèque pour pouvoir avoir des valeurs fiables.
==Câblage : ==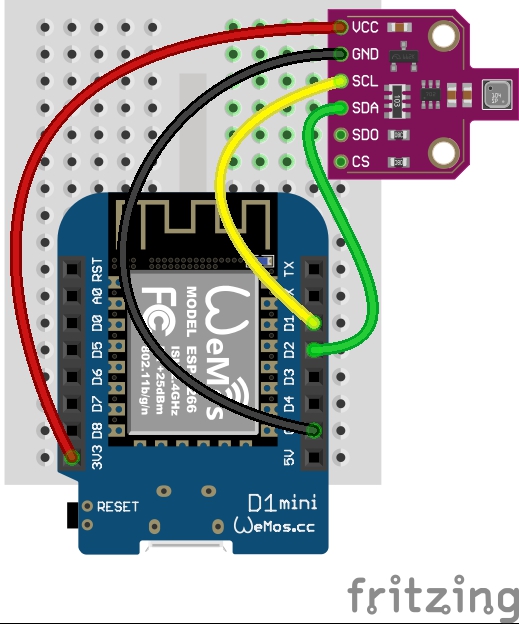
==Code minimal : ==Capteur BME 680 Avant le setup Importation des bibliothèques #include "bsec.h" Création de l’objet Bsec ''objet;'' Dans le setup Démarrage de l’objet Wire.begin();
''objet''.begin(BME680_I2C_ADDR_SECONDARY, Wire);
//Configuration du capteur
bsec_virtual_sensor_t sensorList[4] = {
BSEC_OUTPUT_RAW_PRESSURE,
BSEC_OUTPUT_IAQ,
BSEC_OUTPUT_SENSOR_HEAT_COMPENSATED_TEMPERATURE,
BSEC_OUTPUT_SENSOR_HEAT_COMPENSATED_HUMIDITY,
};
''objet''.updateSubscription(sensorList, 4, BSEC_SAMPLE_RATE_LP);Dans le loop Utilisation if(''objet''.run()){ // Dès que la mesure est effectuée, on affiche les valeurs
''objet''.temperature;
''objet''.humidity;
''objet''.pressure;
''objet''.iaq; //indice de qualité de l'ai 0 -500
''objet''.accuracy; // fiabilité des mesures (0 -> calibration 3-> mesures fiables)
}
==Exemple : ==#include "bsec.h" // ajout de la bibliothèque Bsec de Bosh
Bsec iaqSensor; // creation de l'objet Iaq
void setup(void)
{
Serial.begin(115200); // Initialisation de la connexion série
Wire.begin(); // Démarrage de la connexion I2C avec le capteur
iaqSensor.begin(BME680_I2C_ADDR_SECONDARY, Wire); // démarrage du capteur
bsec_virtual_sensor_t sensorList[4] = { // Configuration du capteur
BSEC_OUTPUT_RAW_PRESSURE,
BSEC_OUTPUT_IAQ,
BSEC_OUTPUT_SENSOR_HEAT_COMPENSATED_TEMPERATURE,
BSEC_OUTPUT_SENSOR_HEAT_COMPENSATED_HUMIDITY,
};
iaqSensor.updateSubscription(sensorList, 4, BSEC_SAMPLE_RATE_LP); // configuration du capteur
}
void loop(void)
{
if (iaqSensor.run()) { // Dès que l'on reçoit des mesures
Serial.print("temperature : ");
Serial.println(iaqSensor.temperature); // Affichage de la température
Serial.print("humidite : ");
Serial.println(iaqSensor.humidity); // Affichage de l'humidité
Serial.print("pression : ");
Serial.println(iaqSensor.pressure); // Affichage de la pression en Pascal
Serial.print("IAQ : ");
Serial.println(iaqSensor.iaq); // Indice de la qualité de l'air
Serial.print("iAQ accuracy : ");
Serial.println(iaqSensor.iaqAccuracy); // Indice de calibration (attendre qu'il passe à 3 pour exploiter les mesures environ 2h)
}
}
Note sur la mesure de COV (Composés Organiques Volatiles) :
Ce capteur est étalonné en laboratoire, il est capable de donner une indication de la qualité de l'air intérieur en fonction de la mesure de la résistance de celui-ci. Un indice d'état de la mesure (indice de calibration) nous indique la fiabilité de la mesure :
Au démarrage du capteur, les valeurs fournies sont un indice de 25 de qualité de l'air et un indice d'etat de 0, il faut attendre au moins 2h pour commencer à avoir des resultats fiables (indice égal à 3). (La documentation indique 4 jours de calibration)
Les gas ciblés par ce capteur sont les suivants :Voici les indices de qualité de l'air intérieur en fonction de la résistance obtenue :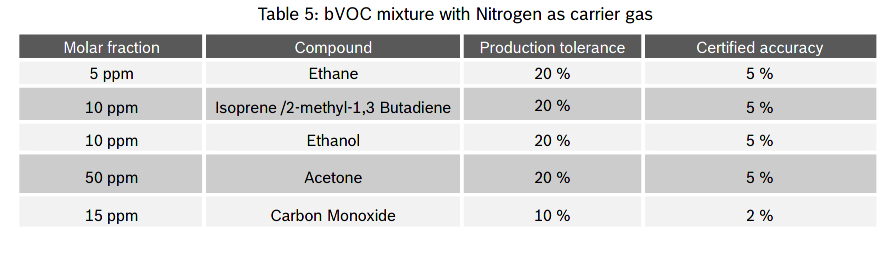
- Item:Bouton poussoir + (<nowiki>C'est un interrupteur simple …
C'est un interrupteur simple qui permet de contrôler les capacités d'une machine ou d'un objet. C'est le principal moyen d'interaction entre l'homme et la machine. idth="465" data-file-height="624" /></a></div></div></span></div><br /><br />==Code Minimal : ==<br /><br/><br />{</nowiki>)
Le bouton poussoir à la particularité de revenir dans son état initiale lorsque qu'on cesse d'appuyer dessus.
Il en existe de deux types :
*Le plus courant c'est le bouton poussoir '''"normalement ouvert"''', le courant ne passe pas quand il est repos, c'est quand on appuie dessus que le courant passe.
*Il existe aussi le bouton poussoir dit '''"normalement fermé"''', au repos il laisse passer le courant, en appuie, il coupe le circuit, le courant ne passe pas.
Ici, nous utilisons le bouton "normalement ouvert".
== Subtilité d'utilisation : ==
Pour que le micro-contrôleur reçoive un signal clair du bouton, nous pouvons utiliser des résistances de pull-up ou pull-down.
Enfin, un bouton, c'est système mécanique. Et contrairement à la théorie, la réalité est complexe. Lorsqu'on appuie et qu'on relâche un bouton, le signal n'est pas simple, ouvert ou fermé, mais il y a un "rebond", un peu comme si on tremblait quand on appuie sur le bouton. Le micro-contrôleur peut alors interpréter le signal comme plusieurs appuis sur le bouton, ce qui est embêtant dans certains cas.
Il existe deux solutions à ce problème :
* mettre un délai de quelques centaines de millisecondes. Cette solution présente le défaut d'utiliser la fonction "delay(200)" qui met en pause le programme.
* mettre une temporisation avec la fonction "millis". Cette solution était bien meilleure, car elle ne bloque pas le programme.
Gérer la temporisation : voir ce tuto très bien fait : http://wiki.t-o-f.info/Arduino/%c3%89liminationDuRebondissement/*
* Code repris de http://wiki.t-o-f.info/Arduino/%c3%89liminationDuRebondissement
*/
int BUTTON_PIN = 0; //GPIO 0 correspond à la broche D3
int previousButtonState;
int count =0;
unsigned long debounceTimeStamp;
void setup() {
Serial.begin(57600);
pinMode( BUTTON_PIN , INPUT_PULLUP );
previousButtonState = digitalRead( BUTTON_PIN );
}
void loop() {
if ( millis() - debounceTimeStamp >= 5 ) {
int currentButtonState = digitalRead( BUTTON_PIN );
if ( currentButtonState != previousButtonState ) {
debounceTimeStamp = millis();
if ( currentButtonState == LOW ) {
count = count + 1;
Serial.println(count);
}
}
previousButtonState = currentButtonState;
}
}
==Câblage : ==
==Code Minimal : ==
{ - Item:POGL Dance e metre + (<nowiki>L’installation combine un mo …
L’installation combine un moteur pas à pas (ou servo) et un bandeau LED NeoPixel contrôlés par un ESP32, afin de faire monter un plaque perforer et faire un jeu de lumière. >├── [STATE] variables d'état (couleurs, index, timer)<br />├── [API HW] moteurs/LEDs (tournerMoteur, setTargetColor, smoothTransition, showColor)<br />├── [LOGIC] mapping densité → angle/couleur + traitement changement<br />├── [APP] setup(), loop() non-bloquante (tick simulation)</pre></div><br />----<br /><br />==⌨️ Algorithme à mettre dans l'ESP32==<br /><div class="annotatedImageDiv" typeof="Image" data-resource="Fichier:Item-POGL Dance e metre sketch.ino" data-sourceimage="https://www.wikidebrouillard.org/images/f/f4/Item-POGL_Dance_e_metre_sketch.ino"><span ><a href="/wiki/Fichier:Item-POGL_Dance_e_metre_sketch.ino" title="Fichier:Item-POGL Dance e metre sketch.ino">Fichier:Item-POGL Dance e metre sketch.ino</a></span></div><br/><br />----<br/><br />==📚 Bibliographie==<br /><br />*https://github.com/benjaminbourlet/Fete_de_la_science_2025.git<br />*https://boxes.hackerspace-bamberg.de/<br />*https://docs.arduino.cc/</nowiki>)
==📊 L'utilisation des données==
Les données de fréquentation du tram sont entièrement simulées dans le tableau `tramDensite` car nous avons pas pu avoir les données en temps réel d'un point de vue RGPD.
Chaque entrée associe une heure (ex. "06:00", "07:00", "08:00") à un niveau de densité passagers : "faible", "moyenne" ou "elevee".
Ce jeu de données joue le rôle d’un scénario type de la journée : faible affluence tôt le matin, pic de densité entre 8h et 9h, puis retour progressif à une densité plus faible.
À partir de ces valeurs simulées, le programme pilote le moteur (angle de rotation) et l’anneau de LED (nuance de bleu) pour représenter visuellement la charge du tram en temps réel simulé.
----
==📖 Sommaire==
#Introduction du projet
##Contexte et objectif
##Principe général de l’installation
#Description de l’installation
##Architecture globale (mécanique et lumineuse)
##Rôle du moteur et du bandeau LED NeoPixel
##Interaction entre mouvement et lumière
#Utilisation des données simulées
##Contexte RGPD et justification du choix
##Structure des données de fréquentation (tramDensite)
##Scénario journalier simulé
##Traduction visuelle des données (moteur + LEDs)
#Notice de montage
##Présentation générale du Dense-e-mètre
##Éléments fournis
##Étapes de montage détaillées
##Mise en service
##Consignes de sécurité
#Matériel utilisé
##Composants électroniques
##Éléments mécaniques
##Matériaux de diffusion et de réflexion lumineuse
#Fonctionnement du système
##État 1 — Faible affluence
##État 2 — Activité moyenne
##État 3 — Forte affluence
##Logique de transition entre les états
#Architecture logicielle
##Rôle de l’ESP32
##Algorithme embarqué
##Gestion des états et des transitions
#Librairies Arduino utilisées
##Adafruit_NeoPixel
##Servo / Stepper
#Perspectives d’évolution
##Connexion à une API temps réel
##Ajout d’interactions utilisateur
##Améliorations visuelles et mécaniques
#Bibliographie et ressources
----
==🏗️ Notice de montage==
===1. Présentation Générale===
Le Dense‑e‑mètre est un objet lumineux interactif composé d’un socle technique intégrant l’électronique, d’un système mécanique rotatif, d’un disque perforé diffusant la lumière, d’un ruban LED circulaire et d’un diffuseur cylindrique translucide.
===2. Éléments fournis===
*- Socle technique
*- Disque perforé
*- Crémaillère verticale
*- Moteur pas‑à‑pas
*- Ruban LED circulaire
*- Carte microcontrôleur et driver
*- Diffuseur translucide
*- Câblage et alimentation
===3. Étapes de montage===
#Installer le moteur sur la paroi centrale.
#Engager la crémaillère avec le pignon moteur.
#Fixer le disque perforé sur l’axe vertical.
#Positionner le ruban LED en cercle.
#Raccorder les éléments électroniques.
#Installer le diffuseur cylindrique.
#Effectuer un test de fonctionnement.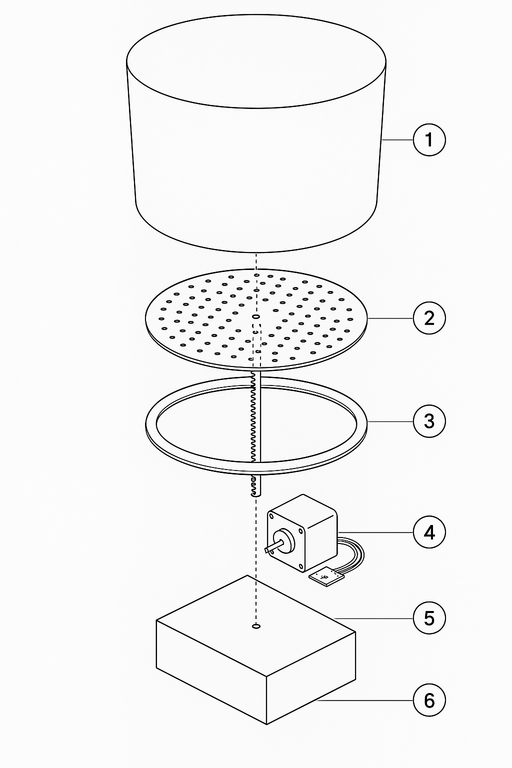
Brancher l’alimentation USB. Le système lumineux et mécanique se met en mouvement automatiquement.
===5. Sécurité===
Ne pas ouvrir le socle sous tension. Ne pas forcer les éléments mobiles. Usage intérieur uniquement.
----
==🔧 Matériel utilisé==Composant Rôle Détails '''ESP32 (6)''' Microcontrôleur principal Gère moteur + LEDs + API en wifi ⚙️ '''Moteur pas à pas / Servo SG90 (4)''' Action mécanique du socle 3 positions (basse, moyenne, haute) 💡 '''Bandeau LED NeoPixel (3)''' Lumière d’ambiance 12 LEDs RGB 📜 Papier rugueux et épais (1) décorer et refléter la lumière environ 60cmx15cm selon la taille du POGL Papier réfléchissant perforer(2) laisse passer plus ou moins la lumière 15cm de diamètre, trou aléatoire 1cm de diamètre
----
==🔩 Étapes de fonctionnement==
#État 1 — Calme / Faible affluence
#*Le socle est en position basse.
#*Les LEDs émettent une lumière bleu-gris claire (calme, froide).
#État 2 — Activité moyenne
#*Le socle monte d’un palier.
#*La couleur devient plus vive (bleu profond / turquoise).
#État 3 — Forte affluence
#*Le socle atteint sa position haute.
#*Les LEDs virent au bleu-blanc lumineux, la “ville” est en mouvement.
Le passage d’un état à l’autre peut être déclenché :
*par une API simulant l’affluence (valeur numérique 0 → 1 → 2 → 3 )
----
== Librairies Arduino==
*Adafruit_NeoPixel.h→ gestion des LEDs avec fil pilote
*Servo.houStepper.h→ contrôle du moteur (selon le modèle choisi)
----
==👨💻 Structure logicielle==main.ino
├── [CONFIG] constantes moteur + LEDs
├── [DOMAIN] types (enum Densite, Color, TramPoint)
├── [DATA] scénario de simulation tram
├── [STATE] variables d'état (couleurs, index, timer)
├── [API HW] moteurs/LEDs (tournerMoteur, setTargetColor, smoothTransition, showColor)
├── [LOGIC] mapping densité → angle/couleur + traitement changement
├── [APP] setup(), loop() non-bloquante (tick simulation)
----
==⌨️ Algorithme à mettre dans l'ESP32==
----
==📚 Bibliographie==
*https://github.com/benjaminbourlet/Fete_de_la_science_2025.git
*https://boxes.hackerspace-bamberg.de/
*https://docs.arduino.cc/ - Item:Verre + (<nowiki>Même si la fabrication du ve …
Même si la fabrication du verre remonte à plus de 6000 ans, c'est la technique du verre soufflé, apparu au Ier siècle av. J.-C. en [https://fr.wikipedia.org/wiki/Syrie Syrie], qui permet d'obtenir des récipients creux. Dans la [https://fr.wikipedia.org/wiki/Rome Rome] antique, l'usage des verres est réservé aux plus riches. Les autres recourent aux contenants de terre cuite ou de métal. )
Au XVe siècle, des verriers inventent à [https://fr.wikipedia.org/wiki/Murano Murano] le ''cristallo'', un verre transparent proche du [https://fr.wikipedia.org/wiki/Cristal cristal]. Dès lors, les formes se raffinent. Des ornements, des pierres précieuses, des filigranes sont ajoutés. Les verres de [https://fr.wikipedia.org/wiki/Venise Venise] sont bientôt copiés dans toute l'[https://fr.wikipedia.org/wiki/Europe Europe].
À la fin du XVIe siècle apparaît le [https://fr.wikipedia.org/wiki/Cristal_de_Boh%C3%AAme cristal de Bohême] qui vient concurrencer celui de Murano. À la même époque, [https://fr.wikipedia.org/w/index.php?title=Caspar_Lehmann&action=edit&redlink=1 Caspar Lehmann], orfèvre à [https://fr.wikipedia.org/wiki/Prague Prague], adapte la technique de la gravure à la roue des pierres précieuses à la taille du verre. Les verres s'ornent alors de motifs et de dessins innombrables.
À [https://fr.wikipedia.org/wiki/Londres Londres], en [https://fr.wikipedia.org/wiki/1676 1676], [https://fr.wikipedia.org/wiki/George_Ravenscroft George Ravenscroft] donne naissance au véritable [https://fr.wikipedia.org/wiki/Cristal_(verre) cristal] en utilisant du charbon et de l'[https://fr.wikipedia.org/wiki/Oxyde_de_plomb oxyde de plomb]. Les [https://fr.wikipedia.org/wiki/Anglais Anglais] développent ainsi un véritable monopole du verre de luxe qu’ils conserveront pendant près d'un siècle. Pour les concurrencer, [https://fr.wikipedia.org/wiki/Louis_XV Louis XV] approuve la fondation d'une verrerie à [https://fr.wikipedia.org/wiki/Baccarat_(cristallerie) Baccarat] en [https://fr.wikipedia.org/wiki/1764 1764], suivie peu après par la [https://fr.wikipedia.org/wiki/Cristallerie_de_Saint-Louis-l%C3%A8s-Bitche Verrerie royale de Saint-Louis]. Le premier cristal français voit enfin le jour en [https://fr.wikipedia.org/wiki/1785 1785].
L'usage des récipients de verre se généralise au XIXe siècle. Coupes, verres, carafes, flûtes, etc. se retrouvent sur toutes les tables et pour tous les usages. Le recours aux récipients de verre se multiplie également pour la conservation d'ingrédients ou la manipulation de produits.
== Composition ==
La plupart du temps, le [https://fr.wikipedia.org/wiki/Verre verre] (matériau) est employé à sa fabrication car il s'agit d'une composition traditionnelle[https://fr.wikipedia.org/wiki/Aide:Pr%C3%A9ciser_un_fait [Quoi ?]] en [https://fr.wikipedia.org/wiki/Europe Europe]. Ce [https://fr.wikipedia.org/wiki/Mat%C3%A9riau matériau] présente le double avantage, d'une part, d'être transparent, ce qui permet de jauger facilement la quantité versée, d'autre part, de très peu réagir avec d'autres espèces chimiques.
Son composant principal est la [https://fr.wikipedia.org/wiki/Silice silice], soit du [https://fr.wikipedia.org/wiki/Sable sable] de rivière. Pour obtenir plus facilement de la [https://fr.wikipedia.org/wiki/P%C3%A2te_de_verre pâte de verre], on rajoute au mélange de silice et d'autres additifs environ un quart de verre cassé, appelé [https://fr.wikipedia.org/wiki/Calcin groisil], d'où l'intérêt des filières de [https://fr.wikipedia.org/wiki/Verre#Recyclage recyclage du verre].
Le verre est un matériau dur mais cassant qui, ne pouvant se dilater facilement, est sensible à la chaleur ; il peut supporter des montées progressives en chaleur mais mal les [https://fr.wikipedia.org/wiki/Choc_thermique_(physique) chocs thermiques] (ex : un verre à température ambiante rempli par un liquide chaud ou au contraire un verre chaud qu'on tente de laver à l'eau froide).
Le type de verre (matériau) le plus répandu est le [https://fr.wikipedia.org/wiki/Verre_sodocalcique sodo-calcique] (''soda-lime'' en anglais). Le [https://fr.wikipedia.org/wiki/Verre_borosilicate verre boro-silicate] est un verre plus résistant à la chaleur, utilisé pour les [https://fr.wikipedia.org/wiki/Cafeti%C3%A8re cafetières] et tasses en verre de faible épaisseur, ainsi que les plats à four.
Le [https://fr.wikipedia.org/wiki/Cristal_(verre) cristal] est obtenu par addition de 24 % ou plus d'[https://fr.wikipedia.org/wiki/Oxyde_de_plomb(II) oxyde de plomb] (PbO). Cela améliore la brillance, la sonorité et la [https://fr.wikipedia.org/wiki/Mall%C3%A9abilit%C3%A9 malléabilité] de la pâte de verre. Pour des questions environnementales (et de santé humaine, cela est plus polémique), le cristal est en voie d'être abandonné.
Le cristallin est un matériau verrier de contenance en plomb intermédiaire.
Le verre peut être [https://fr.wikipedia.org/wiki/Verre_tremp%C3%A9 trempé], un traitement thermique le plus souvent qui ne modifie pas sa composition mais augmente sa résistance aux chocs physiques et thermiques. Le verre trempé sodo-calcique est particulièrement utilisé dans les [https://fr.wikipedia.org/wiki/Bar_(%C3%A9tablissement) bars] pour sa solidité et aussi par sécurité : si on le casse il se brise en mille morceaux et ne devient pas une arme potentielle.
Le verre est appelé [https://fr.wikipedia.org/wiki/Gobelet_(vaisselle) gobelet] s'il n'a pas de pied, « forme haute » s'il est plus haut que large, « forme basse » s'il est plus large que haut.
Le verre à pied voit son développement après l'[https://fr.wikipedia.org/wiki/Affaire_des_Poisons Affaire des Poisons] : il oblige les domestiques à porter le verre par la jambe et les empêche ainsi d'approcher discrètement la main du liquide pour y verser un poison[https://fr.wikipedia.org/wiki/Verre_%28r%C3%A9cipient%29#cite_note-1 1].
Toutefois, l'avènement des [https://fr.wikipedia.org/wiki/Mati%C3%A8re_plastique matières plastiques] permit la fabrication à grande échelle de gobelets à très bas coût dont la composition peut varier : [https://fr.wikipedia.org/wiki/Polystyr%C3%A8ne polystyrène], [https://fr.wikipedia.org/wiki/Chlorure_de_polyvinyle PVC] et plastiques alimentaires. Outre le fait d'être bon marché, les gobelets sont nettement plus solides et légers que les équivalents en verre, et sont plus adaptés à une multitude d'usages. Cependant, leur effet sur la santé n'est pas maitrisé, vu le dégagement de [https://fr.wikipedia.org/wiki/Styr%C3%A8ne styrène] à la chaleur[https://fr.wikipedia.org/wiki/Verre_%28r%C3%A9cipient%29#cite_note-2 2]. D'après l'Agence internationale de recherche sur le cancer, le styrène pourrait être cancérogène pour l'homme. Plusieurs études effectuées sur une population de salariés exposés au styrène ont mis en évidence un risque de [https://fr.wikipedia.org/wiki/Leuc%C3%A9mie leucémie]. Des études sur des animaux ont montré que le styrène est faiblement [https://fr.wikipedia.org/wiki/Canc%C3%A9rog%C3%A8ne cancérogène] par inhalation ou ingestion.
Enfin le [https://fr.wikipedia.org/wiki/Bois bois] et les matières telles que la [https://fr.wikipedia.org/wiki/Corne_(biologie) corne] restent réservés à des usages précis et ne sont plus guère utilisés en raison des contraintes hygiéniques. - Item:Que faire en cas d'incendie + (<nowiki>Un incendie peut survenir '' …
Un incendie peut survenir '''à tout moment''', que ce soit '''à la maison, sur votre lieu de travail ou dans un espace public'''. Face à une telle situation, '''savoir comment réagir rapidement et efficacement''' peut faire toute la différence pour '''protéger des vies et limiter les dégâts matériels'''. Mais '''que faire concrètement en cas d'incendie''' dans son entreprise? Dans cet article, nous vous guiderons à travers '''les étapes clés''' : '''de la détection du danger à l'évacuation en toute sécurité''', en passant par '''les gestes de prévention à adopter'''. '''Une préparation adéquate''' et '''des réflexes bien ancrés''' sont vos meilleurs alliés face aux risques d'incendie. abilités en cas d'incident.<br /><br />'''4. Pourquoi choisir Alertis ?'''<br /><br />* '''Expertise reconnue''' : Alertis est un organisme spécialisé en sécurité incendie, avec des formations adaptées à tous les secteurs d'activité.<br />* '''Pédagogie interactive''' : Nos sessions combinent théorie et pratique pour un apprentissage optimal.<br />* '''Accompagnement personnalisé''' : Nous adaptons nos formations à vos besoins spécifiques et à votre environnement de travail.<br /><br />Investir dans une formation incendie avec Alertis, c'est protéger vos salariés, vos locaux et garantir une conformité irréprochable. Toutes les informations sont disponibles sur : https://www.alertis.fr/formation/formation-incendie/<br /><br />Ne laissez pas le risque vous surprendre : '''préparez-vous dès aujourd'hui !'''</nowiki>)
'''En 1er il faut déclencher l'alarme incendie en utilisant un déclencheur manuel :'''
En cas d'incendie, '''la première action essentielle est de déclencher l'alarme incendie''' en utilisant un '''déclencheur manuel'''. Cet outil, autrefois appelé '''"brise-glace"''', tire son nom de son fonctionnement initial qui nécessitait de briser une petite vitre pour activer l'alarme.
Cette action est cruciale pour plusieurs raisons :
# '''Informer immédiatement les salariés''' : Le déclenchement de l'alarme permet de signaler à l'ensemble des occupants la présence d'un danger imminent.
# '''Accélérer l'évacuation''' : Une fois avertis, les employés savent qu'ils doivent quitter les lieux sans délai, conformément aux consignes d'évacuation.
# '''Prévenir les risques de propagation''' : Même un petit feu peut rapidement dégénérer en un incendie incontrôlable, surtout dans des environnements où des matériaux inflammables sont présents.
# '''Pallier l'absence de détecteurs de fumée dans les entreprises''' : Contrairement aux habitations, la législation n'impose pas de détecteurs de fumée dans les locaux professionnels. Le déclencheur manuel reste donc le '''seul moyen d'alerter efficacement'''.
Le gain de temps offert par cette action peut sauver des vies et limiter les dégâts matériels. Assurez-vous que les déclencheurs manuels soient visibles, accessibles et que les salariés soient formés à leur utilisation.
Les détecteurs de fumée ne sont pas une obligation dans les établissements recevant du public ou des travailleurs. Il est donc important que le salarié sache où trouver les déclencheurs manuels sur son lieu de travail.
En 2ème il faut utiliser un extincteur :
'''Deuxième action : Utiliser le premier extincteur disponible'''
Une fois l'alarme déclenchée, '''il est essentiel d'utiliser immédiatement le premier extincteur à proximité''' pour tenter de maîtriser le feu, à condition qu'il soit encore '''naissant'''. Les extincteurs sont stratégiquement positionnés en fonction de la nature des risques (feu de papier, d'hydrocarbures, électrique, etc.) pour une intervention rapide et efficace.
'''Pourquoi utiliser un extincteur sur un feu naissant ?'''
* Les feux naissants sont encore contrôlables avec un extincteur approprié.
* Un temps de réaction rapide peut empêcher la propagation et limiter les dégâts.
* L'utilisation d'un extincteur permet de gagner du temps pour que l'évacuation se déroule en toute sécurité.
'''Étapes pour utiliser un extincteur :'''
# '''Retirer la goupille de sécurité''' : Cette goupille empêche l'extincteur de se déclencher accidentellement. Ne pas s’appuyer sur la poignée au moment de retirer la goupille.
# '''Percuter ou presser la poignée''' (selon le modèle) : Cela amorce le fonctionnement de l'appareil. Il existe 2 types de mise en œuvre des extincteurs :
#* Les extincteurs à '''pression auxiliaire''' qui nécessite de les percuter
#* Les extincteurs à '''pression permanente''' qui sont déjà sous pression (ex : extincteur C2)
# '''Tester rapidement l'extincteur''' : Effectuez une brève pulvérisation pour vérifier son bon fonctionnement et le diriger dans la bonne direction. Attention, l’extincteur à eau pulvérisée avec additif contient de l’eau et un agent de type mousse qui peut glisser. Il est donc impératif de réaliser son test dans un coin de pièce.
# '''Viser la base des flammes''' : Dirigez le jet à la base du feu, là où il se nourrit, plutôt que sur le haut des flammes.
# '''Respecter la distance de sécurité''' : Approchez-vous à 2 à 3 mètres du feu (extincteur à eau pulvérisée avec additifs ou poudre) ou 1 m pour les extincteurs à CO2, tout en restant prêt à reculer si nécessaire.
# '''Utiliser des mouvements de balayage''' : Effectuez des mouvements latéraux pour couvrir toute la zone enflammée.
'''Précautions importantes :'''
* Si le feu devient incontrôlable, cessez immédiatement l'intervention et évacuez.
* Ne perdez pas de temps à chercher un extincteur spécifique si le feu se propage rapidement.
Cette action, bien exécutée, peut suffire à stopper un incendie à ses débuts et à protéger les personnes et les biens en attendant l'intervention des secours.
'''3ème action contacter les secours :'''
Une fois l'alarme déclenchée et l'utilisation d'un extincteur tentée (si possible), '''il est crucial d'appeler les services de secours''' pour une intervention rapide et coordonnée. Cet appel doit être précis, clair et organisé pour transmettre toutes les informations nécessaires.
'''Étapes pour appeler les secours'''
# '''Composer le numéro d'urgence''' :
#* '''18''' : Pompiers.
#* '''112''' : Numéro d'urgence européen (recommandé si vous n'êtes pas sûr du service à contacter).
#* '''114 :''' Service par SMS pour application pour les personnes dans l'incapacité de parler
Vous pouvez également utiliser le service urgence du téléphone portable pour contacter les secours.
# '''Donner un message d'alerte clair et structuré''' :
#* '''Votre identité''' : "Je suis [votre prénom et votre nom]."
#* '''Localisation exacte''' : Fournissez l'adresse complète, y compris :
#** Le nom de l'entreprise ou du bâtiment.
#** L'adresse précise avec numéro et rue.
#** Le code d'accès ou tout autre détail pour faciliter l'accès des secours (ex. : étage, bâtiment spécifique).
#** Exemples : "Nous sommes au 15, rue des Pompiers, Zone industrielle Nord, Bâtiment B, avec un code d'accès 2589."
#* '''Nature de l'incident''' : "Il s'agit d'un incendie localisé dans [zone précise : bureau, entrepôt, cuisine, etc.]."
#* '''Risques éventuels''' : Mentionnez la présence de produits dangereux ou inflammables si applicable.
#* '''État de la situation''' : "Le feu est naissant / en cours de propagation. Les employés sont en cours d'évacuation."
# '''Ne pas raccrocher en premier''' : Attendez que l'opérateur des secours confirme avoir reçu toutes les informations nécessaires.
# '''Déléguer une personne pour aller à leur rencontre''' : Envoyez un collègue ou un responsable à l'extérieur pour guider les pompiers dès leur arrivée.
# '''Fournir si possible le plan d’intervention ou les plans des locaux''' : Assurez-vous que les secours disposent des '''plans d'évacuation''' et d'une indication claire des accès aux zones sinistrées et aux points sensibles (issues de secours, extincteurs, localisations de produits dangereux, arrêts d’urgence).
'''Pourquoi est-ce important ?'''
Un appel structuré et précis permet aux secours d'intervenir rapidement et efficacement, en évitant les pertes de temps liées à une mauvaise communication. Cela peut sauver des vies et limiter l'ampleur des dégâts.
'''4ème action : se rendre au point de rassemblement'''
Après avoir déclenché l'alarme, tenté d'utiliser un extincteur, et alerté les secours, '''il est impératif de procéder à l'évacuation vers le point de rassemblement'''. Cette étape garantit la sécurité des occupants en les éloignant du danger et permet de s'assurer que tout le monde est bien évacué.
En cas d'incendie, se rendre au point de rassemblement est essentiel pour assurer la sécurité de tous. Cela permet de vérifier rapidement la présence des personnes évacuées et d’identifier d’éventuels disparus. Le respect de cette procédure facilite l’intervention des secours en évitant les retours inutiles dans la zone dangereuse. Enfin, cela contribue à une évacuation ordonnée et efficace, réduisant ainsi les risques de panique.
'''Règles de sécurité pour l'évacuation'''
# '''Ne pas paniquer et suivre les consignes''' : Gardez votre calme et évacuez de manière ordonnée.
# '''Fermer les portes et fenêtres''' : Cela limite la propagation des flammes et des fumées, en ralentissant le développement de l'incendie.
# '''Ne pas utiliser les ascenseurs''' : Les ascenseurs peuvent devenir des pièges en cas de dysfonctionnement ou de coupure de courant. Descendre par les communications existantes
# '''Utiliser les issues de secours''' : Empruntez les chemins balisés et sécurisés indiqués par les plans d'évacuation. Si la porte ne s’ouvre pas sur les portes électriques, utiliser le boitier vert pour déverrouiller la porte.
# '''Se baisser en cas de fumée''' : L'air est plus respirable près du sol. Protégez vos voies respiratoires avec un tissu humide si possible.
# '''Rendez'''-vous au point de rassemblement.
'''Rôle des guides-files et serre-files'''
# '''Guide-files''' :
#* Dirigent les salariés vers les issues de secours et les accompagnent jusqu'au point de rassemblement.
#* Vérifient que tous les occupants suivent le bon chemin d'évacuation en toute sécurité et gère l’évacuation.
# '''Serre-files''' :
#* Se placent en dernier pour s'assurer que personne ne reste dans les locaux.
#* Vérifient les bureaux, sanitaires et zones communes pour s'assurer qu'ils sont vides.
#* Signalent toute difficulté ou obstacle au guide-file ou aux secours.
#* Se rendent au point de rassemblement.
----'''Actions spécifiques pour les salariés'''
* '''Ne pas revenir sur ses pas''' : Une fois évacué, ne retournez pas dans le bâtiment pour récupérer un sac, un ordinateur.
* '''Aider les personnes en difficulté''' : Si une personne est en danger ou en incapacité d'évacuer, avertissez immédiatement les secours.
* '''Ne pas récupérer sa voiture au parking en sous'''-sol.
'''Gestion des personnes handicapées et des espaces d'attente sécurisés (EAS)'''
# '''Espaces d'attente sécurisés''' :
#* Ces zones sont spécialement conçues pour accueillir temporairement les personnes en situation de handicap en attendant l'arrivée des secours.
#* Elles sont généralement équipées d'un système de communication avec les pompiers.
#* Les guides-files doivent accompagner les personnes concernées vers ces espaces si elles ne peuvent évacuer seules.
# '''En cas d'impossibilité d'évacuer''' :
#* Si vous êtes bloqué, isolez-vous dans une pièce.
#* Fermez la porte et les fenêtres pour limiter l'entrée de fumée.
#* Signalez votre présence aux secours depuis une fenêtre ou par téléphone.
#* En cas de fumée, restez au ras du sol et respirez par un tissu humide.
'''Le point de rassemblement : un lieu clé'''
* Tous les occupants doivent se rendre au point de rassemblement indiqué dans les consignes de sécurité.
* '''Rôle des responsables''' : Vérifier la présence de tout le personnel à l'aide des listes ou des registres d'appel.
* Signalez immédiatement toute personne manquante aux secours.
L'évacuation rapide et organisée vers le point de rassemblement est essentielle pour garantir la sécurité de tous et permettre aux secours d'intervenir efficacement.
'''La formation incendie : une étape essentielle pour apprendre à manipuler les extincteurs'''
'''Pourquoi suivre une formation incendie avec Alertis ?'''
La prévention et la gestion des risques incendie sont des priorités absolues pour garantir la sécurité des salariés et protéger les biens de l'entreprise. Avec '''Alertis''', vous bénéficiez d'une formation complète et efficace pour apprendre '''les gestes essentiels à adopter en cas d'incendie''', maîtriser l'utilisation des extincteurs et assurer votre conformité réglementaire.
'''1. Apprendre les bons réflexes pour sauver des vies'''
Un incendie peut survenir à tout moment, et les premières minutes sont décisives pour éviter des conséquences graves. Grâce à notre formation incendie :
* Vous apprendrez '''la conduite à tenir en cas d'incendie''', notamment comment réagir face aux flammes et à la fumée.
* Vous serez formé à l'évacuation sécurisée, à identifier les points de rassemblement et à aider les personnes en difficulté.
'''2. Maîtriser l'utilisation des extincteurs'''
Nos formateurs expérimentés vous enseignent à :
* '''Identifier le bon type d'extincteur''' en fonction de la nature du feu (solide, liquide, gaz, électrique).
* '''Utiliser correctement un extincteur''' grâce à des exercices pratiques : retirer la goupille, tester l'appareil et viser la base des flammes.
* Gagner en confiance pour intervenir efficacement sur un feu naissant et limiter les dégâts.
'''3. Être en conformité avec la réglementation'''
La formation incendie est non seulement une démarche responsable, mais aussi une obligation légale pour les entreprises. En suivant une formation avec Alertis :
* Vous répondez aux exigences du '''Code du travail''' (articles R.4227-28 à R.4227-39), qui impose une sensibilisation des salariés au risque incendie.
* Vous garantissez la sécurité de vos employés tout en réduisant vos responsabilités en cas d'incident.
'''4. Pourquoi choisir Alertis ?'''
* '''Expertise reconnue''' : Alertis est un organisme spécialisé en sécurité incendie, avec des formations adaptées à tous les secteurs d'activité.
* '''Pédagogie interactive''' : Nos sessions combinent théorie et pratique pour un apprentissage optimal.
* '''Accompagnement personnalisé''' : Nous adaptons nos formations à vos besoins spécifiques et à votre environnement de travail.
Investir dans une formation incendie avec Alertis, c'est protéger vos salariés, vos locaux et garantir une conformité irréprochable. Toutes les informations sont disponibles sur : https://www.alertis.fr/formation/formation-incendie/
Ne laissez pas le risque vous surprendre : '''préparez-vous dès aujourd'hui !''' - Item:Passoire + (<nowiki>Une passoire est un filtre q …
Une passoire est un filtre qui revêt la forme d'un récipient percé de nombreux orifices. Ceux-ci permettent le passage du liquide et retiennent les aliments de taille suffisante. //fr.wikipedia.org/wiki/Passoire#/media/Fichier:Colander_(PSF).jpg)</nowiki>)
Agiter l'ustensile ou exercer une légère pression sur son contenu peut faciliter l'écoulement.
Elle peut également servir à laver des fruits et légumes ou à laisser refroidir des aliments cuits à l'eau.
Photo issue de Wikipedia (https://fr.wikipedia.org/wiki/Passoire#/media/Fichier:Colander_(PSF).jpg) - Item:Carte + ( * Couper : prendre une partie des cartes … * Couper : prendre une partie des cartes depuis le dessus du paquet pour les passer sous le paquet. Le joueur chargé de couper le paquet est généralement différent de celui qui bat le jeu. Désigne aussi dans certains jeux l'action de jouer une carte atout pendant un pli où l'atout n'est pas la couleur demandée. * La défausse : désigne un emplacement où les joueurs disposent, généralement face visible, les cartes dont ils se débarrassent au cours du jeu. * Distribuer ou donner : attribuer les cartes aux joueurs, une à une ou par paquets, en tournant dans le sens des aiguilles d'une montre ou dans l'autre sens, selon le jeu pratiqué. Le joueur qui distribue les cartes est appelé le [https://fr.wikipedia.org/wiki/Donneur_(jeu_de_cartes) donneur]. * La donne désigne dans la plupart des jeux de cartes la période de jeu (ou l'ensemble des actions ayant cours pendant cette période) qui commence par la distribution des cartes et se termine lorsque plus aucune carte ne peut être jouée. * Un [https://fr.wikipedia.org/wiki/Joker_(carte_%C3%A0_jouer) joker] ou une frime[https://fr.wikipedia.org/wiki/Jeu_de_cartes#cite_note-1 1] (Québec) : le joker se rencontre généralement en paire, sa fonction est très variée mais généralement il permet de remplacer n'importe quelle autre carte. Il fut inventé vers 1850, probablement par les Américains qui l'incorporaient dans le jeu d'[https://fr.wikipedia.org/w/index.php?title=Euchre&action=edit&redlink=1 euchre]. Il est représenté sous forme d'un bouffon, d'un lutin ou d'un clown, ce qui correspond bien au mot anglais « ''joker'' » (« farceur » ou « blagueur »). Auparavant, on l'appelait ''Juker card'', l'euchre étant nommé ''juker'' ; puis, un jour, il fut nommé définitivement ''Joker''. * Une main ou un jeu : désigne les cartes détenues par un des joueurs. * La pioche, le talon ou la pige (Québec) : désigne le tas de cartes non distribuées, souvent retourné « Face cachée », et dans lequel le joueur peut ou doit « piocher » une carte selon les règles. * Un pli ou une levée : désigne l'ensemble des cartes jouées pendant un tour de jeu et généralement ensuite ramassées par le joueur ayant gagné ce tour. Désigne aussi le tour de jeu proprement dit. * Le ponte est, dans les jeux de hasard intéressés (baccara, pharaon, roulette, etc.), la personne qui joue contre le banquier. raon, roulette, etc.), la personne qui joue contre le banquier. )
- Item:Écosociété - jeu sérieux + (<br/>
=Écosociété=
=== Déroulement …
=Écosociété= === Déroulement d’un tour de jeu === Au début du jeu, on décide d’un meneur de jeu (généralement, l’animateur ou quelqu’un qui a déjà joué). Le meneur choisi les cartes rôles et les distribue, un par joueur (lui-même n’en prends pas). Les joueurs regardent secrètement leur carte et ne divulgue pas leur rôle. Selon leur rôle, les joueurs auront des conditions de victoire différent (cf descriptions des cartes). '''Tour de jeu''' La nuit tombe et le meneur de jeu appelle, une à une, les cartes rôles qui peuvent activer leur pouvoir. Les personnes ayant les cartes appelées sont les seules à pouvoir ouvrir les yeux et, une fois leur tour fini, ils referment les yeux. Les rôles appelés sont, dans l’ordre : **Le fournisseur d’énergie (uniquement la première nuit), qui choisit son mentor ; **Le journaliste montre au meneur la personne dont il veut voir la carte ; **La police de l’environnement, qui décide qui elle protège pour la nuit ; **Les pollueurs, qui choisissent quelqu’un à polluer ; pendant le tour des pollueurs, le lanceur d’alerte peut espionner discrètement ; **Un tour sur deux, le profiteur se réveille et pollue une personne de plus ; **Le transporteur choisit s’il veut polluer et/ou dépolluer des gens ; **La filière déchet ; **Le climatosceptique choisit la personne qui se réveillera avec deux votes ; Lorsque le climatosceptique a refermé les yeux, tout le monde (lui y comprit), les rouvre : la nuit est fini. Le meneur de jeu désigne (si c’est le cas) la ou les personnes qui ont été pollués et la personne qui a eut les deux votes liés au climatosceptique. On élit ensuite un maire. Les citoyens essayent de trouver le ou les pollueurs par le biais d’un vote. Ils débattent et recoupent les indices qu’ils ont pour essayer de se convaincre de voter pour la personne qu’ils pensent être le pollueur. La personne qui récolte le plus de vote est envoyé en prison ; elle est alors éliminée du jeu. Dans les cas où personnes n’a d’indice, les joueurs peuvent décider de passer le vote s’ils sont tous d’accord : le vote n’est pas effectué, personne ne va en prison et la nuit tombe à nouveau. === Conditions de victoire === Lorsque tous les citoyens sont éliminés ou en prison, les pollueurs gagnent. Lorsque tous les pollueurs sont en prison, les citoyens gagnent. === Les cartes rôles === Le '''citoyen''' n’a pas de pouvoir spécial, sauf celui de la décision : il peut, comme les autres, voter pour essayer de trouver les pollueurs. Les citoyens gagnent quand tous les pollueurs sont en prison. Le '''pollueur''' cherche à éliminer tous les citoyens. Chaque nuit, à l’appel du maître du jeu, il désignera quelqu’un à polluer. Les personnes polluées peuvent toujours voter, mais pas utiliser leur pouvoir de rôle[[#sdfootnote1sym|1]]. Les pollueurs gagnent quand tous le monde (qu’ils le soient eux-même ou non) est pollués. Le '''lanceur d’alerte''' est un espion, qui peut entrouvrir les yeux pendant le tour des pollueurs pour essayer de les trouver. Attention ! S’il est trop peu discret, il sera découvert et les pollueurs le désigneront sûrement. Le lanceur d’alerte gagne avec les citoyens. Le '''journaliste''' est un enquêteur : chaque nuit, lorsqu’il est appelé, il désigne un autre joueur. Le meneur lui révèle alors la carte de cet autre joueur. Le journaliste gagne avec les citoyens. Le '''militant''' attire dans la tombe ceux qui ose l’importuner : s’il est pollué, ou jeté en prison, il désigne quelqu’un qui va en prison avec lui. Le militant gagne avec les citoyens. L’'''agriculteur''' dispose de réserve de lisier qu’il n’hésite pas à répandre si on l’embête. S’il est jeté en prison, les joueurs à sa droite et à sa gauche sont pollués. L’agriculteur gagne avec les citoyens. La '''filière déchet''' dispose d’indice sur la provenance des pollutions : chaque nuit, le meneur lui désigne une moitiés des joueurs dans laquelle se trouve un pollueur La filière déchet gagne avec les citoyens. La '''police de l'environnement''' permet de prévenir et, en détecter au plus tôt les pollutions, de réduire leur impact. Chaque nuit, juste avant le tour des pollueurs, elle désigne une personne. Celle-ci ne sera pas pollué, même si les pollueurs (ou le transporteur, ou le profiteur) la désigne. La police de l’environnement gagne avec les citoyens. Le '''lobbyiste''' dispose d’un fort pouvoir d’influence : une fois par jeu, il peut (pendant le jour) prendre la carte du maire à la personne qui l’a pour l’instant. L’ancien maire est envoyé en prison. Le '''climatosceptique''' partage de fausse information : quand il est appelé pendant la nuit, il désigne une personne. Celle-ci aura déjà deux voix contre elle lors du prochain vote. Le '''fournisseur d’énergie''' peut être très polluant s’il choisit les énergies fossiles : lors de la première nuit, il se réveille et désigne un autre joueur. Si ce joueur se révèle être un pollueur lorsqu’il est jeté en prison, le fournisseur d’énergie devient un pollueur. Dans ce cas, il gagne avec les pollueurs, sinon avec les citoyens. L’'''éleveur''' est souvent blâmé pour des pollutions qui ne sont pas toujours sa cause : si les joueurs décident de ne pas voter, il est jeté en prison. Le '''transporteur''', selon les modes de déplacement qu’il choisit, peut avoir un impact positif ou négatif. Une fois par partie, il peut construire des pistes cyclables, ce qui dépollue quelqu’un de son choix. Il peut aussi construire une autoroute, ce qui pollue quelqu’un de son choix. Le '''profiteur''' se réveille avec les pollueurs et vote avec eux pour polluer quelqu’un. Et, une nuit sur deux, il se réveille seul et vote à nouveau pour polluer une autre personne : il peut à ce moment désigner un pollueur, s’il le souhaite. Il gagne seul.
='''Éléments pédagogiques'''= '''Objectifs pédagogiques''' Comme le jeu vise à ce que chaque joueur apprenne à mieux connaître les acteurs de l’adaptation au changement climatique, il peut être intéressant de réaliser plusieurs parties avec un même groupe : ainsi, chaque joueur devrait pouvoir tester plusieurs cartes, donc plusieurs rôles représentant plusieurs acteurs. '''Pistes pour animer cette expérience''' Il peut être intéressant de relier chaque rôle à une personne qui est connue des joueurs (personnalité publique, voisin…). '''Sources et ressources''' Ce jeu a été créé en s’inspirant du librement des « Loups-garous de Thiercelieu », jeu de société créé par Philippe des Pallières et Hervé Marly en 2001. Durée Choisir parmi la liste ( supprimer les durées inutiles) 15 mn ; Discipline(s) scientifique(s) Choisir parmi la liste : (supprimer les disciplines inutiles) Sciences sociales Thème(s) Acteurs de l’adaptation au changement climatique Concept(s) scientifique(s) Informations complémentaires
Préciser ici s'il y a d'autres modifications effectuées (cut de texte, suppression d'image etc...) [[#sdfootnote1anc|1]]Sauf si cette personne a été pollué dans la nuit qui est en train de se dérouler ; par exemple, un journaliste, qui joue après les pollueurs, peut utiliser son pouvoir une dernière fois avant que, au matin, elle ne découvre qu’elle a été pollué.)Statut (mettre OK + URL ou liens si images dispos sur Wikideb), ou « A ajouter » Photos Vidéo Niveau scolaire (Classes où la notion est étudiée) - Item:Composant électronique + (== '''Description''' ==
On peut avoir reco … == '''Description''' ==
On peut avoir recours à ces composants pour nos montages avec [http://www.wikidebrouillard.org/index.php?title=Cat%C3%A9gorie:Arduino Arduino]. Les circuits électroniques font aussi appel à des circuits de base, nous les listons ici également.
Les composants sont classés en trois catégories :
* Les composants électroniques
* Les capteurs
* Les actionneurs
D'une manière générale, il faut se renseigner sur la manière d'utiliser les composants. Les constructeurs réalisent toujours une "datasheet", feuille qui décrit les caractéristiques et l'utilisation du composant.
== comment les utiliser avec Arduino ==
Dans cet excellent article, vous trouverez 35 codes sources pour mettre en oeuvre les différents capteurs et actionneurs sur Arduino : http://blog.f8asb.com/?p=1529
== '''Composants''' ==
Les composants électroniques font partie des circuits que nous réalisons.
'''Photo''' '''Nom et lien''' '''Symbole européen''' '''Symbole américain''' '''Description'''
Diode [http://www.wikidebrouillard.org/index.php?title=Diode Diode] C'est un composant qui ne laisse passer le courant que dans un seul sens.Résistance [http://www.wikidebrouillard.org/index.php?title=R%C3%A9sistance Résistance] Elle résiste au passage du courant.Breadboard [http://www.wikidebrouillard.org/index.php?title=Breadboard Breadboard, platine labtec, plaque de prototypage,...] C'est là-dessus qu'on va brancher les composants électriques.Condensateurs [http://www.wikidebrouillard.org/index.php?title=Condensateur Condensateur] Ils stockent de l'électricité.Transistor [http://www.wikidebrouillard.org/index.php?title=Transitor Transitor] Il a 3 pattes. L'une des pattes sert à contrôler le courant dans les deux autres. Il est utilisé soit comme interrupteur, soit comme amplificateur.Bobine [http://www.wikidebrouillard.org/index.php?title=Bobine_(Coil)&action=edit&redlink=1 Bobine (Coil)] C'est un enroulement de fil électrique.Circuit intégré [http://www.wikidebrouillard.org/index.php?title=Circuit_int%C3%A9gr%C3%A9&action=edit&redlink=1 Circuit intégré] C'est un circuit enfermé dans un petit boîtier (donc un assemblage de composants). Il en existe de plusieurs sortes qui font des choses plus ou moins compliquées. Le micro-contrôleur de l'Arduino (ATmega) en est un.Masse ou terre [http://www.wikidebrouillard.org/index.php?title=Masse_(%C3%A9lectronique)&action=edit&redlink=1 masse (électronique)] La masse (Terre, ou GND - pour ground en anglais, le sol), c'est le potentiel 0. Elle représente 0 V. == '''Les capteurs''' == Leur rôle est de récupérer des données qui seront utilisées par l'arduino. Il en existe de 2 types : * Les capteurs dit "logiques" * Les capteurs analogiques. Les capteurs logiques renvoient des informations sous formes de 0 ou de 1 (pas de courant ou courant). Les capteurs analogiques renvoient une valeur en lien avec ce qui est mesuré (une tension : quelques volts). Par exemple, une photorésistance renvoie une valeur qui dépend de la quantité de lumière reçue. Ces capteurs peuvent être linéaires ou non-linéaires. Lorsqu'un capteur est linéaire, la valeur renvoyée par le capteur varie de la même manière que la grandeur physique mesurée. Lorsque le capteur n'est pas linéaire, la relation entre la grandeur mesurée et la valeur donnée par le capteur est plus complexe. '''Photo''' '''Nom et lien''' '''Symbole européen''' '''Symbole américain''' '''Description'''Résistance [http://www.wikidebrouillard.org/index.php?title=Photor%C3%A9sistance Photorésistance] Elle s'oppose au passage du courant. Sa résistance dépend de la lumière. Plus il y a de lumière, moins il y a de résistance.potentiomètre [http://www.wikidebrouillard.org/index.php?title=Potentiom%C3%A8tre Potentiomètre ou résistance variable] Il s'agit d'une résistance dont on peut faire varier la valeur. Il en existe de différentes formes (linéaire, rotative, etc...). Elle a trois sorties : la masse, la tension et la valeur de la résistance.capteur de pression [http://www.wikidebrouillard.org/index.php?title=Capteur_de_pression Capteur de pression]Servomoteur [http://www.wikidebrouillard.org/index.php?title=Servomoteur Servomoteur] C'est un moteur un peu spécial. Il connaît l'angle de rotation et sa position (information qu'il peut donner).Interrupteur [http://www.wikidebrouillard.org/index.php?title=Interrupteur&action=edit&redlink=1 Interrupteur] Il sert à ouvrir (éteindre) ou fermer (allumer) un circuit imprimé.bouton poussoir [http://www.wikidebrouillard.org/index.php?title=Bouton_poussoir Bouton poussoir] Un bouton poussoir sert à faire passer le courant lorsqu'on appuie dessus ou au contraire garder le circuit "éteint" lorsqu'on le relâche.Capteur de température [http://www.wikidebrouillard.org/index.php?title=Capteur_de_temp%C3%A9rature Capteur de température] Il indique la température.Capteur de infrarouge [http://www.wikidebrouillard.org/index.php?title=Capteur_infra-rouge Capteur infra-rouge] == '''Les actionneurs''' == Ils reçoivent des ordres de l'Arduino pour effectuer des tâches. Ils convertissent une valeur électrique en action physique : * Émettre de la lumière. * Effectuer une rotation pour un moteur * Chauffer * Afficher un message * .... '''Photo''' '''Nom et lien''' '''Symbole européen''' '''Symbole américain''' '''Description'''Diode Electroluminescente [http://www.wikidebrouillard.org/index.php?title=LED Diode Electro-Luminescente (DEL, LED).] Une sorte d'ampoule, c'est une diode (le courant ne passe que dans un sens) qui est lumineuse.Afficheur 7 segments [http://www.wikidebrouillard.org/index.php?title=Afficheur_7_segments Afficheur 7 segments] Il s'agit simplement de sept LED de formes adaptées.Buzzer [http://www.wikidebrouillard.org/index.php?title=Buzzer Buzzer piezo-electrique] C'est un composant qui peut émettre des sons de notes différentes. Il peut aussi être utilisé à l'envers, c'est à dire comme capteur de pression. Piézo-électrique, signifie que lorsqu'on appuie dessus il émet du courant, ou au contraire, quand on lui envoie du courant, il change de taille.Moteur électrique [http://www.wikidebrouillard.org/index.php?title=Moteur_%C3%A9lectrique&action=edit&redlink=1 Moteur électrique] Il fournit un mouvement qui tourne !Servomoteur [http://www.wikidebrouillard.org/index.php?title=Servomoteur Servomoteur] C'est un moteur un peu spécial. Il connait l'angle de rotation et sa position (information qu'il peut donner).ventilateur [http://www.wikidebrouillard.org/index.php?title=Ventilateur Ventilateur] C'est un moteur sur lequel des pales sont fixées.Ecran LCD [http://www.wikidebrouillard.org/index.php?title=Ecran_LCD Ecran LCD]Relais [http://www.wikidebrouillard.org/index.php?title=Relais&action=edit&redlink=1 Relais] C'est un interrupteur électro-mécanique, interrupteur classique commandé par de l'électricité (un électro-aimant actionne l'interrupteur mécanique).Machin ... == '''les circuits de base''' == ils servent souvent, dans plusieurs situations ! de grands classiques de l'électronique, quoi ! === '''Le pont diviseur de tension''' === http://fr.wikipedia.org/wiki/Pont_diviseur_de_tension === '''Le pont diviseur de courant''' === http://fr.wikipedia.org/wiki/Pont_diviseur_de_courant === '''La diode de roue libre''' === http://forums.futura-sciences.com/electronique/83733-diode-de-roue-libre.html === résistance de rappel et résistance de tirage === Pull up/ Pull down * http://fr.wikipedia.org/wiki/Résistance_de_rappel === filtre anti rebond === avec condensateurension === '''Le pont diviseur de courant''' === http://fr.wikipedia.org/wiki/Pont_diviseur_de_courant === '''La diode de roue libre''' === http://forums.futura-sciences.com/electronique/83733-diode-de-roue-libre.html === résistance de rappel et résistance de tirage === Pull up/ Pull down * http://fr.wikipedia.org/wiki/Résistance_de_rappel === filtre anti rebond === avec condensateur) - Item:Pile + (== Composition chimique == Depuis décembre … == Composition chimique == Depuis décembre 1998, les piles au mercure sont interdites en Europe et aux États-Unis pour des problèmes environnementaux. Il existe donc trois grandes technologies de piles grand public : * '''Pile « alcaline » 1,5 V''' ( ⊝ Zn / Zn(OH)42- / K+ + OH- / MnO(OH) / MnO2 / C ⊕ ). * '''Pile « saline carbone-zinc » 1,5 V'''. Pour des appareils à faibles besoins ( ⊝ Zn / Zn2+ / NH4+ + Cl- / MnO(OH) / MnO2 / C ⊕ ). * '''Pile « lithium 1,5 V »''' (appelée aussi L91). Elle risque d’exploser si on tente de la recharger, capable de maintenir très longtemps la tension électrique. On trouve aussi des piles à l'oxyde d'argent (certaines piles boutons pour montres) ou des piles air-zinc (utilisées notamment dans les prothèses auditives) (⊝ Zn / ZnO // Ag2O / Ag / C ⊕). == [[http://www.wikidebrouillard.org/index.php?title=Pile&action=edit§ion=4 modifier]] Propriétés == "Une pile électrique (ou plus simplement pile) est un dispositif électrochimique transformant l'énergie d'une réaction chimique en énergie électrique..." ([http://fr.wikipedia.org/wiki/Pile_%C3%A9lectrique Source Wikipédia]) == [[http://www.wikidebrouillard.org/index.php?title=Pile&action=edit§ion=5 modifier]] Expériences qui utilisent ce matériel == Indiquer le '''concept scientifique''' associé à chacune des expériences. === [[http://www.wikidebrouillard.org/index.php?title=Pile&action=edit§ion=6 modifier]] Sur Wikidébrouillard === * [http://www.wikidebrouillard.org/index.php?title=Le_lance_patate_explosif Le lance patate explosif] * [http://www.wikidebrouillard.org/index.php?title=Moteur_%C3%A9lectrique_simple Moteur électrique simple] * [http://www.wikidebrouillard.org/index.php?title=Faire_bouger_avec_de_l%E2%80%99%C3%A9lectricit%C3%A9 Faire bouger avec de l’électricité] * [http://www.wikidebrouillard.org/index.php?title=Conductivit%C3%A9 Conductivité] * [http://www.wikidebrouillard.org/index.php?title=Cr%C3%A9ons_des_piles Créons des piles] : comment créer une pile avec des fruits, des liquides, un fil ? === [[http://www.wikidebrouillard.org/index.php?title=Pile&action=edit§ion=7 modifier]] Autres expériences utilisant ce matériel === Liens internet == [[http://www.wikidebrouillard.org/index.php?title=Pile&action=edit§ion=8 modifier]] Où la trouver facilement ? == * s'achète dans les supermarchés, les magasins de bricolage etc... * Il existe également des piles rechargeables : [http://www.fiches-pratiques.net/piles-rechargeables.php Pourquoi les préférer aux piles jetables et lesquelles choisir ?] == [[http://www.wikidebrouillard.org/index.php?title=Pile&action=edit§ion=9 modifier]] Utilisations dans la vie quotidienne == Une pile de part sa dimension convient bien à tous les objets transportables pour les alimenter en électricité : réveil, lampe torche, appareil photo, lecteur mp3... == [[http://www.wikidebrouillard.org/index.php?title=Pile&action=edit§ion=10 modifier]] Plus d'informations sur Pile == === [[http://www.wikidebrouillard.org/index.php?title=Pile&action=edit§ion=11 modifier]] Le recyclage === Les piles sont des '''déchets à traiter avec précaution'''. Elles contiennent des métaux (nickel - cadmium - mercure - plomb - fer - zinc - lithium) dont certains sont '''toxiques''' et '''nocifs''' pour l'environnement. En outre les piles ne sont évidemment pas biodégradables. Les métaux lourds ont été éliminés de la plupart des piles vendues sur le marché. Ainsi les piles alcalines ne contiennent plus de métaux lourds (sauf à l'état de trace), la loi l'interdisant depuis des années. Certaines piles boutons en revanche contiennent encore du mercure qui est un métal lourd dangereux. C'est également le cas de certains accumulateurs Ni-Cd qui contiennent du cadmium. métal lourd dangereux. C'est également le cas de certains accumulateurs Ni-Cd qui contiennent du cadmium.)
- Item:Alcool à brûler + (== Composition chimique == L'alcool à brûl … == Composition chimique == L'alcool à brûler C2H6O est un mélange composé d'éthanol CH3–CH2-OH dénaturé avec du méthanol CH3OH. == [[http://www.wikidebrouillard.org/index.php?title=Alcool_%C3%A0_br%C3%BBler&action=edit§ion=4 modifier]] Propriétés == L'alcool à brûler est hautement toxique du fait de la présence de méthanol (en général 5 à 10%). == Où le trouver facilement ? == On le trouve facilement en grandes surfaces ou magasin de bricolage. == [[http://www.wikidebrouillard.org/index.php?title=Alcool_%C3%A0_br%C3%BBler&action=edit§ion=7 modifier]] Utilisations dans la vie quotidienne == L'alcool à bruler peut être utilisé pour nettoyer les vitres et les surfaces plastiques. Il est également capable de détacher le vinyle, l'acrylique et différentes colles synthétiques. On s'en sert également par exemple pour faire une fondue bourguignonne, c'est ce qui permet de chauffer le récipient contenant l'huile. ce qui permet de chauffer le récipient contenant l'huile.)
- Item:Régle + (== Composition chimique == en plexiglas, e … == Composition chimique == en plexiglas, en bois ou en métal == [[http://www.wikidebrouillard.org/index.php?title=R%C3%A8gle&action=edit§ion=4 modifier]] Propriétés == Une règle est droite, et est souvent graduée. == [[http://www.wikidebrouillard.org/index.php?title=R%C3%A8gle&action=edit§ion=5 modifier]] Expériences qui utilisent ce matériel == === [[http://www.wikidebrouillard.org/index.php?title=R%C3%A8gle&action=edit§ion=6 modifier]] Sur le Wikidébrouillard === [http://www.wikidebrouillard.org/index.php?title=Equilibre_marteau_%26_r%C3%A8gle Equilibre marteau & règle] => centre de gravité === [[http://www.wikidebrouillard.org/index.php?title=R%C3%A8gle&action=edit§ion=7 modifier]] Autres expériences utilisant ce matériel === Liens internet Pourquoi ne pas [http://www.wikidebrouillard.org/index.php?title=Aide:Aide#Comment_cr.C3.A9er_une_nouvelle_page_.3F réaliser la fiche expérience] pour le Wikidébrouillard ! == [[http://www.wikidebrouillard.org/index.php?title=R%C3%A8gle&action=edit§ion=8 modifier]] Où la trouver facilement ? == * Dans son bureau * A l'école * Au boulot == [[http://www.wikidebrouillard.org/index.php?title=R%C3%A8gle&action=edit§ion=9 modifier]] Utilisations dans la vie quotidienne == * Une règle sert à faire des lignes droite : voir article [http://fr.wikipedia.org/wiki/Droite_(math%C3%A9matiques) droite en géométrie] sur Wikipédia. * Une règle sert à mesurer : voir [http://fr.wikipedia.org/wiki/M%C3%A9trologie article Métrologie] sur Wikipédia.à mesurer : voir [http://fr.wikipedia.org/wiki/M%C3%A9trologie article Métrologie] sur Wikipédia.)
- Item:Sel + (== Description == Il s'agit d'une poudre p … == Description == Il s'agit d'une poudre plus ou moins blanche ou grise composée de grains plus ou moins gros. Il existe du gros sel et du sel fin. [http://fr.wikipedia.org/wiki/Sel_de_cuisine le sel de cuisine sur wikipédia] == [[http://www.wikidebrouillard.org/index.php?title=Sel_de_cuisine&action=edit§ion=2 modifier]] Origine == On le fabrique en faisant évaporer de l'eau de mer. tiens, tiens, l'occasion d'une expérience ??? == [[http://www.wikidebrouillard.org/index.php?title=Sel_de_cuisine&action=edit§ion=3 modifier]] Composition chimique == NaCl, son nom chimique c'est le '''Chlorure de Sodium'''. Une molécule de '''Chlorure de Sodium''' est composée d'un atome de '''Chlore''' et d'un atome de '''Sodium'''. La [http://fr.wikipedia.org/wiki/Chlorure_de_sodium#Structure_chimique Structure chimique du chlorure de sodium] sur Wikipédia == [[http://www.wikidebrouillard.org/index.php?title=Sel_de_cuisine&action=edit§ion=4 modifier]] Propriétés == # Absorbe l'humidité de l'air. # Donne le goût '''salé''' sur la langue. # Empêche le développement des bactéries quand il est suffisamment concentré (comme dans le saucisson sec, le jambon cru ou les confits de canard !!!). == [[http://www.wikidebrouillard.org/index.php?title=Sel_de_cuisine&action=edit§ion=5 modifier]] Expérience qui utilise ce matériel == === [[http://www.wikidebrouillard.org/index.php?title=Sel_de_cuisine&action=edit§ion=6 modifier]] sur Wikidebrouillard === * [http://www.wikidebrouillard.org/index.php?title=Danse_du_sel Danse du sel] * [http://www.wikidebrouillard.org/index.php?title=Cristaux_de_sel Cristaux de sel] * [http://www.wikidebrouillard.org/index.php?title=P%C3%AAche_aux_gla%C3%A7ons Pêche aux glaçons] * [http://www.wikidebrouillard.org/index.php?title=Fabrication_de_cristaux_de_sel Fabrication de cristaux de sel] === [[http://www.wikidebrouillard.org/index.php?title=Sel_de_cuisine&action=edit§ion=7 modifier]] autres sites d'expériences === * [http://www.pedagogie.ac-nantes.fr/html/peda/svt/sel/sommaire.htm#KLINK Dossier réalisé par des lycéens vendéens] [site de l'académie de Nantes] == [[http://www.wikidebrouillard.org/index.php?title=Sel_de_cuisine&action=edit§ion=8 modifier]] Où le trouver facilement ? == * Dans toutes les cuisines !!! * dans toutes les épiceries, supérettes, supermarchés,... Le terme '''sel''' peut désigner le '''[https://fr.wikipedia.org/wiki/Sel_alimentaire sel]''' utilisé en alimentation, composé essentiellement de [https://fr.wikipedia.org/wiki/Chlorure_de_sodium chlorure de sodium] NaCl, et principalement produit à partir de [https://fr.wikipedia.org/wiki/Sel_gemme sel gemme] ou de [https://fr.wikipedia.org/wiki/Sel_de_mer sel de mer]. Il est utilisé comme condiment ou comme agent de conservation ou de préparation dans l'[https://fr.wikipedia.org/wiki/Industrie_agroalimentaire industrie agroalimentaire]. Mais son acception, tant en chimie que dans la vie pratique, les expressions et locutions, les acronymes, etc., sont plus vastes : * En [https://fr.wikipedia.org/wiki/Chimie chimie] moderne, un '''[https://fr.wikipedia.org/wiki/Sel_(chimie) sel]''' est un solide ionique, correspondant à un assemblage réticulaire d'[https://fr.wikipedia.org/wiki/Ion ions] de charges différentes. * En chimie ancienne, le sel était un solide soluble, ininflammable et ressemblant globalement au sel par ses propriétés. Quelques composés chimiques, autrefois usuels, conservent des appellations issues de substances salines anciennes : * l'''esprit de sel'' est l'[https://fr.wikipedia.org/wiki/Acide_chlorhydrique acide chlorhydrique] ; * le ''sel admirable'' est la [https://fr.wikipedia.org/wiki/Mirabilite mirabilite] ou sulfate de sodium décahydraté ; * le ''sel amer'' est le [https://fr.wikipedia.org/wiki/Chlorure_de_potassium chlorure de potassium] ; * le ''sel ammoniac'' ou [https://fr.wikipedia.org/wiki/Salmiac salmiac] est le [https://fr.wikipedia.org/wiki/Chlorure_d%27ammonium chlorure d'ammonium], autrefois chlorhydrate d'ammonium ; * le ''sel de citron'' est le tetraoxalate de potassium, utilisé autrefois pour dissoudre les taches d'encre ; * le ''[https://fr.wikipedia.org/wiki/Sulfate_de_magn%C3%A9sium sel d'Epsom]'' en Angleterre, ou sel amer de Sedlitz, correspond au sulfate de magnésium ; * le ''[https://fr.wikipedia.org/wiki/Sulfate_de_sodium sel de Glauber]'' désigne le [https://fr.wikipedia.org/wiki/Sulfate_de_sodium sulfate de sodium] ; * le ''[https://fr.wikipedia.org/wiki/Sel_de_Mohr sel de Mohr]'' est un sulfate de fer(II) et d'ammonium ; * le ''sel d'oseille'' est le [https://fr.wikipedia.org/wiki/Acide_oxalique bioxalate de potassium] ou oxalate acide de potassium ; * le ''sel de Saturne'' désigne le sel d'[https://fr.wikipedia.org/wiki/Ac%C3%A9tate_de_plomb acétate de plomb] sous forme cristal ; * le ''[https://fr.wikipedia.org/wiki/Sel_de_Seignette sel de Seignette]'' ou ''sel des tombeaux'', ou encore ''sel de Rochelle'', est le tartrate double de potassium et de sodium ; * le ''[https://fr.wikipedia.org/wiki/Sels_min%C3%A9raux_de_Vichy sel de Vichy]'' est essentiellement composé de [https://fr.wikipedia.org/wiki/Bicarbonate_de_sodium bicarbonate de sodium] ; * le ''sel rose'' est le stannichlorure d'ammonium, utilisé comme mordant en teinture ; * le ''sel volatil'' ou sels anglais est le sesquicarbonate d'ammonium. Notons que dans la pensée savante antique ou alchimique, le sel a longtemps été considéré comme un élément, au même titre que le soufre, le mercure, le feu, l'air, etc.ment, au même titre que le soufre, le mercure, le feu, l'air, <abbr class="abbr" title="et cetera">etc.</abbr>)
- Item:La malinette + (== Description == La Malinette est un ense … == Description == La Malinette est un ensemble logiciel et matériel dédié à la créativité et la pédagogie. Un projet libre initié par Reso-nance numérique. La partie logicielle est construite autour d'un langage de programmation graphique en « temps réel » Pure Data (souvent abrégé Pd) est un logiciel de création multimédia interactive couramment utilisé dans les domaines artistique, scientifique et pédagogique. Sa popularité réside notamment dans sa facilité d'utilisation. Plutôt qu'un langage de programmation textuel, Pure Data propose un environnement de programmation graphique dans laquelle l'utilisateur est invité à manipuler des icônes représentant des fonctionnalités et à les brancher ensemble. === [[http://www.wikidebrouillard.org/index.php?title=Malinette&action=edit§ion=3 modifier]] Un logiciel de création multimédia interactive === Pure Data est utilisé dans tous les champs de la création (musique, arts visuels, danse, théâtre, robotique, etc.) pour des performances visuelles et sonores ou la création d'installations interactives, participatives et génératives. Il possède des capacités particulières dans les domaines de la musique acoustique et de la musique audio-numérique : il sert à modéliser des instruments électroniques comme les synthétiseurs. Il permet la gestion d'échantillonneurs (samplers) et d'effets, la composition musicale, ou encore, la création de séquenceur MIDI, etc. Il peut également gérer des applications vidéo et 3D. Avec Pure Data, il est possible également d'interfacer un programme avec le monde physique en utilisant des capteurs (caméras, détecteurs de présence, etc.) pour commander des robots, interagir avec des sites internet, ou encore effectuer une visualisation de données. En art appliqué, il est utilisé en design d'interaction, en architecture et pour créer des jeux. Par ailleurs, on trouve des utilisateurs de Pure Data dans d'autres disciplines techniques et scientifiques comme l'électronique, les sciences physiques et les mathématiques. Par exemple, il peut être un excellent outil de mesures acoustiques. Enfin, c'est un outil pédagogique pour les analyses acoustiques et audio-numériques, la synthèse sonore, la 3D, les opérations mathématiques, et de multiples autres domaines. Grâce à son système de programmation intuitif, Pure Data favorise l'apprentissage et l'expérimentation. De nombreux enseignants et formateurs pédagogues l'utilisent pour leurs cours, formations et ateliers ; certains conçoivent à l'aide de ce logiciel des dispositifs numériques originaux d'enseignement. L'accès à tous ces domaines constitue une formidable richesse. Le croisement des disciplines et des compétences crée une effervescence créative et stimulante. Cependant, certains domaines techniques, comme la manipulation du son, font appel à des connaissances très spécialisées qui dépassent la simple utilisation d'un logiciel. Cela peut créer des obstacles et des frustrations qu'il ne faut pas nier. Ces difficultés peuvent être dépassées en utilisant les ressources d'aide disponibles comme les forums et les listes de diffusion. Une expérience de programmation visuelle et intuitive Si Pure Data emprunte à la programmation classique certaines notions comme les noms de fonctions (objets), son attrait réside dans son environnement graphique. La programmation graphique permet d'organiser des applications avec des icônes sans faire appel à des lignes de texte, contrairement aux environnements de programmation traditionnels que sont par exemple le langage C ou le Pascal. Programmer avec Pure Data est une expérience qui s'apparente à manipuler des choses tangibles et à les brancher ensemble. L'unité de base est une boîte rectangulaire, et l'écriture du programme (le patch) consiste à relier plusieurs boîtes par des ficelles (ou cordes). Cela forme des graphes, ou diagrammes, qui mettent en abyme leur propre fonctionnement. Le programme fonctionne en temps réel, permettant ainsi à l'utilisateur de modifier son code et de voir aussitôt les changements s'appliquer. À ce jour, l'espace de travail (l'interface) du logiciel Pure Data est disponible uniquement en anglais. Malgré cela, son utilisation reste simple et il est très probable que les versions à venir proposeront une traduction en plusieurs langues, dont le français. Les nombreux atouts de ce logiciel libre le rendent suffisamment incontournable pour commencer à apprendre à l'utiliser sans plus attendre. === [[http://www.wikidebrouillard.org/index.php?title=Malinette&action=edit§ion=4 modifier]] Un logiciel libre et gratuit === Fonctionnant sur les plateformes Linux, Mac et Windows, Pure Data est un logiciel libre et gratuit. La licence « Standard Improved BSD » qui protège ce logiciel permet en effet un travail collaboratif, l'accessibilité des sources et une distribution gratuite auprès des utilisateurs. Le noyau de Pure Data (Pd Vanilla) est toujours maintenu par son créateur, Miller Puckette. Par la suite, de nombreux développeurs se sont joints au projet : ils ont ainsi permis d'ajouter des « librairies » qui étendent les capacités du logiciel. Celles-ci sont fournies avec Pure Data Extended, version du logiciel qui offre plusieurs améliorations par rapport à la version Vanilla. La communauté se compose de développeurs, d'utilisateurs et de personnes « ressources ». Les développeurs de librairie créent de nouveaux objets en langage C ou C++, ou aident à l'amélioration générale du programme. Les utilisateurs s'y consacrent à des fins artistiques, scientifiques ou pédagogiques. Ils peuvent aussi contribuer à la communauté en partageant leurs expériences auprès des développeurs ou en éditant des documents, des tutoriels, etc. Les personnes « ressources » organisent des événements de transmission des connaissances (conventions), des rencontres, des festivals artistiques et participent ainsi à la vitalité des échanges dans la communauté. == [[http://www.wikidebrouillard.org/index.php?title=Malinette&action=edit§ion=5 modifier]] Petit historique == Pure Data fait partie de la famille des langages de programmation par patchs comme JMax, VVVV, Ingen, etc. Cette famille de langages constituée de boîtes et de ficelles tire son origine de la conception modulaire expérimentée dans les premiers programmes musicaux de Max Mathews au cours des années 1950, programmes qui ont par la suite inspiré les premiers synthétiseurs analogiques. Miller Puckette est le créateur de Pure Data. En 1988, au sein de l'Ircam, une institution française dédiée à la recherche et à la création musicale contemporaine, il développe l'éditeur Patcher (http://crca.ucsd.edu/~msp/Publications/icmc88.pdf). Ce logiciel fut revendu à la société Opcode pour créer bien plus tard Max/MSP. Pour sa part, Miller Puckette reprit la conception de Patcher pour en faire un logiciel libre à des fins musicales : Pure Data. Les conditions de la vente du logiciel Patcher à une entreprise commerciale, alors que la phase de recherche initiale était intégralement financée par des fonds publics, font encore aujourd'hui débat. Pure Data est pour sa part publié sous la licence libre BSD. Tout en garantissant de toujours pouvoir utiliser, partager et modifier librement Pure Data, cette licenc autorise la privatisation du code source de ce programme : c'est ainsi que les créateurs de Max/MSP ont pu légalement copier le code source de Pure Data pour créer la partie qui s'occupe du traitement de signal audio de leur logiciel propriétaire. Source : http://fr.flossmanuals.net/puredata/ == [[http://www.wikidebrouillard.org/index.php?title=Malinette&action=edit§ion=6 modifier]] LA MALINETTE == La Malinette est une interface intuitive initiée par Reso-nance Numérique permettant une programmation rapide et simple dans Pure Data. Son accessibilité permet à toute personne, programmeur novice comme confirmé, de créer des projets complexes rapidement. Elle intègre de base la gestion de divers objets tel que : Arduino, Kinnect, Rasberry Pi, Smartphone via OSC, Makey Makey ; par extension, on peut y ajouter des manettes de jeux, des contrôleurs et claviers MIDI, et beaucoup de périphériques se connectant à l'ordinateur. === [[http://www.wikidebrouillard.org/index.php?title=Malinette&action=edit§ion=7 modifier]] Comment l'utiliser ? === Il faut télécharger le logiciel Pure Data-Extended sur le site. http://puredata.info/downloads/pd-extended Télécharger la Malinette sur le site. http://reso-nance.org/malinette/download/ Installer PD-Extended, de-zipper la Malinette. Lancer le fichier Malinette.pd dans le dossier malinette. === [[http://www.wikidebrouillard.org/index.php?title=Malinette&action=edit§ion=8 modifier]] Configuration === La Malinette fonctionne sur toutes les machines (puissantes ou non) et tout les OS (Mac, Windows, Linux). Tout d'abord, Pure Data a peut-être détecté automatiquement votre interface audio ! Pour vérifier si celle-ci fonctionne, choisissez l'item "Test Audio and MIDI" dans le menu "Media" de Pure Data et le patch "testtone.pd" apparaît. Repérez les colonnes de carrés à gauche du patch sous le titre "TEST TONES". Ces carrés ou cases sont des choix multiples dont les options sont : "OFF", "60" ou "80". Pour entendre un joli La à 440 Hz, cliquez sur la case correspondant au choix "60" ou "80" et un carré noir apparaît dans la case que vous avez sélectionnée. Si vous entendez un son, cela signifie que Pure Data a détecté votre interface audio. Dans le cas contraire, il va vous falloir la configurer. Nous verrons comment faire par la suite. On peut changer le son du test par un bruit en choisissant l'option "NOISE" plutôt que "TONE" en cliquant dans la case correspondante. Pour capturer et lire un son, Pure Data prend en charge de nombreux pilotes qui dépendent de votre système d'exploitation. Les pilotes servent à supporter des appareils audio. Ceux-ci sont listés dans le menu "Media". Sur GNU/Linux, les pilotes supportés sont : OSS, ALSA ou JACK ; sur Mac OS X : portaudio ou JACK ; sur Windows : ASIO ou MME. Pour Windows, il est possible d'installer Asio4all (http://www.asio4all.com/). ==== [[http://www.wikidebrouillard.org/index.php?title=Malinette&action=edit§ion=9 modifier]] LINUX ==== Pour linux, il est nécéssaire d'installer le noyau lowlatency afin d'avoir accès au logiciel Jackd. •'''Noyau Temps Réel''', indispensable aux musiciens valable jusqu'à Ubuntu 10.04 LTS1) mais il est déconseillé pour les ordinateurs portables car consommant beaucoup de batterie et inutile quand on n'utilise pas les outils audio, installez le paquet linux-rt (apt://linux-rt) pour les versions antérieures à Ubuntu 10.10, ou pour les versions plus récentes, installez le paquet linux-lowlatency (apt://linux-lowlatency) ou linux-lowlatency-pae (apt://linux-lowlatency-pae). •Installer jackd, c'est facile : il suffit d'installer le paquet jackd (apt://jackd). Jackd est indispensable pour lier virtuellement les différents programmes manipulant le son entre eux. Exactement comme l'on pourrait se servir de prises Jack avec des machines dédiés. •Le but de Jackd est donc de vous permettre des interactions entres les programmes poussés. •Lancer jackd puis démarrer le serveur (bouton play), à savoir que la plupart des cartes sons internes sont reconnues, par contre seul quelques cartes sons externes fonctionnent sur linux. Lancer la malinette, vérifier que dans les options le son passe par jackd. ==== [[http://www.wikidebrouillard.org/index.php?title=Malinette&action=edit§ion=10 modifier]] WINDOWS ==== Sur windows, les deux pilotes possibles sont MME et ASIO. MME permet d'utiliser simplement les pilotes natif de toute carte son. Peu puissant et ayant une grande latence, ils permettent cependant de faire fonctionner facilement la malinette. ASIO sont les pilotes puissant de windows, plus puissant et permettant une petite latence, ils sont cependant pas toujours tres stables et ne permettent de faire fonctionner qu'une seule instance à la fois. Plus d'informations ici. http://fr.flossmanuals.net/puredata/ch011_configurations-audio-et-midi == [[http://www.wikidebrouillard.org/index.php?title=Malinette&action=edit§ion=11 modifier]] Les limites de la Malinette. == Pure Data (comme beaucoup de langages de programmations) mélange divers protocoles (HID, OSC, MIDI) qui n'ont pas les mêmes spécificités selon les OS ; ainsi les protocoles HID (manettes de jeux par exemples) ne sont pas stables sur Windows mais le sont sur Linux. En cours de développement, la Malinette peut manquer de certaines choses. La traduction à ce jour est encore incomplète.rs de développement, la Malinette peut manquer de certaines choses. La traduction à ce jour est encore incomplète.)
- Item:Arduino nano + (== Description longue == Un super outil po … == Description longue == Un super outil pour la bidouille électro-technique ! '''Arduino''' est un circuit imprimé qualifié de libre et open-source (les plans sont consultables et tout le monde peut fabriquer une copie exacte de l'Arduino, contrairement à la plupart des objets manufacturés de notre environnement comme les machines à laver, les téléphones, les ordinateurs). Seuls le nom et le logo sont réservés. Sur Arduino se trouve un microcontrôleur (calculateur) qui peut être programmé pour analyser et produire des signaux électriques. En gros, on y branche des capteurs, le programme de l'Arduino traite les informations données par le capteur et déclenche des actions (comme allumer ou éteindre, augmenter, diminuer...). Il peut être utilisé pour effectuer des tâches très diverses comme la charge de batteries, la domotique (le contrôle des appareils domestiques (éclairage, chauffage...), le pilotage d'un robot, etc. Arduino peut être utilisé pour construire des objets interactifs indépendants (prototypage rapide), ou bien peut être connecté à un ordinateur pour communiquer avec ses logiciels. === Plusieurs versions === Il existe plusieurs versions de l'Arduino officiel, plus des versions réalisées par d'autres constructeurs. Sur wikidébrouillard, nous utiliserons en général l'Arduino Uno. == Origines == Il était destiné à l'origine principalement mais pas exclusivement à la programmation multimédia interactive, en vue de spectacles ou d'animations artistiques. L’histoire retiendra que c’est dans un bar d’une petite ville du nord de l’Italie qu’est né le projet Arduino. C’est en l’honneur de ce bar où Massimo Banzi a pour habitude d’étancher sa soif que fut nommé le projet électronique Arduino (dont il est le cofondateur). Arduino est une carte microcontrôleur à bas prix qui permet — même aux novices — de faire des choses époustouflantes. Sortie en 2005 comme un modeste outil pour les étudiants de Banzi à l’Interaction Design Institute Ivrea (IDII), Arduino a initié une révolution DIY dans l’électronique à l’échelle mondiale. Vous pouvez acheter une carte Arduino pour une vingtaine d'euros ou vous construire la vôtre à partir de rien : tous les schémas électroniques et le code source sont disponibles gratuitement sous des licences libres. Le résultat est qu’Arduino est devenu le projet le plus influent de son époque dans le monde du matériel libre. [http://www.framablog.org/index.php/post/2011/12/10/arduino-histoire Lire tout l'article source en CC-By-Sa sur Framablog] == Comment l'utiliser ? == * Il faut télécharger le [[Item:Logiciel Arduino|logiciel]] de programmation [http://www.arduino.cc/fr/ sur le site Arduino]. * L'installer sur son ordinateur (le logiciel est compatible Linux, Mac OSX et Windows). Et vous pouvez commencer par tester, dans les exemples de programmes, le programme "Blink" qui fera clignoter la LED de l'Arduino qui est branchée sur la pin 13. Vous pouvez aussi tester le tutoriel [[Blinker une LED]]. On peut donner des "pouvoirs" supplémentaires à l'arduino grâce à des circuits imprimés qu'on branche dessus : les shields. Il en existe de différentes sorte : * ethernet : pour connecter votre arduino au réseau via un câble RJ45, * Bluetooth * Zigbee : pour communiquer par ondes radio * Wifi * Pilotage de moteurs * Ecran LCD * shield Breadboard : pour faire les montages directement sur l'arduino ! * ... == Qu'est-ce que c'est exactement ? == === Un micro-contrôleur === C'est un circuit intégré qui traite les informations qu'il reçoit et déclenche des actions suivant le programme qu'il a reçu. === Interface USB/série === L'Arduino se connecte à un ordinateur par un câble USB. C'est par ce câble qu'on va installer le programme. C'est également par ce câble que l'Arduino peut renvoyer des informations à l'ordinateur. Lorsque l'Arduino est connecté en USB, c'est l'USB qui assure l'alimentation électrique de l'Arduino. Pour l'ordinateur, la carte Arduino est comme un simple périphérique (il faut donc installer les pilotes !). === Des entrées et des sorties === Il y a 20 entrées/sorties sur l'Arduino. * 6 analogiques, numérotées de A0 à A5. * 14 numériques, numérotées de 0 à 13. 6 de ces entrées/sorties peuvent assurer une sortie PWM (Pulse Width Modulation - Modulation de Largeur d'Impulsion, une astuce pour modifier le courant de sortie). Les 6 PMW sont les numéros 3, 5, 6, 9, 10, 11. ==== Les entrées analogiques ==== Elles peuvent recevoir une tension variable (entre 0 et 5 volts) en provenance de capteurs analogiques (résistance variable par exemple). ==== Les entrées/sorties numériques ==== Elles reçoivent ou envoient des signaux numériques (donc 0 ou 1). ces signaux se traduisent par 0V ou 5V. Le fonctionnement (entrée ou sortie) est fixé dans le programme (INPUT, OUTPUT). ===== Entrées numériques : attention au smog électromagnétique ===== Lorsque qu'une entrée numérique n'est connectée à rien, elle reçoit un signal dû à l'électricité statique ou l'ambiance électromagnétique. On parle alors de potentiel flottant. On peut fixer le potentiel grâce à un système de résistance dite de pull-up (tension max, soit 5V) ou pull down (tension min ou 0V). On utilise une résistance de 10kOhms connectée de l'entrée au +5V (pull-up), ou alors à la masse (GND, 0V, le pull-down). ===== Sorties numériques ===== Leur puissance est limitée à 40 mA par broche pour un total de 200mA consommé. Si on a besoin de consommer plus de puissance électrique, alors il faudra utiliser un circuit supplémentaire (une autre carte, pilotée par l'Arduino qui servira à fournir le courant nécessaire. ça peut être un shield). Dans ce cas on parle de circuit de commande (l'arduino), et de circuit de puissance (le shield). Il est important que les masses (GND) soient connectées. La puce ATmega n'est pas capable de sortir des tensions variables mais grâce au signal PMW on peut fournir une tension variable artificielle. Le signal PMW consiste à faire "clignoter" le courant : * Quand le courant sort à 5V en continue, la broche sort du 5V. * Imaginez maintenant que la broche délivre très rapidement un clignotement entre 0V et 5V (la broche délivre soit 0V, soit 5V). Si elle délivre pour moitié du temps du 5V, elle imitera du 2,5V. Si elle donne 5V 20% du temps ce sera 1V, etc.... == Les limites de l'arduino == === Avec quoi alimenter mon arduino ? === * Par le port USB : 5V * Par une alimentation externe : ** Une fiche jack 2.1 mm mâle. ** Une alimentation DC stabilisée entre 7~12 volts DC. ** Le centre positif + <-----o )------> - l'arduino peut accepter entre 6, minimum et 20 Volts grand maximum. Intensité maximale disponible par broche entrée/sortie 5V : 40 mA (avec un total de 200 mA) Intensité maximale disponible pour la sortie 3,3V : 50 mA Intensité maximale disponible pour la sortie 5V : 500 mA en cas d'alimentation par le port USB seul, sinon en fonction de l'alimentation utilisée. * Mémoire Programme Flash : 32 KB (ATmega328) dont 0.5 KB sont utilisés par le bootloader * Mémoire SRAM (mémoire volatile) : 2 KB (ATmega328) * Mémoire EEPROM (mémoire non volatile) : 1 KB (ATmega328) * Vitesse d'horloge : 16 MHz [http://www.mon-club-elec.fr/pmwiki_reference_arduino/pmwiki.php?n=Main.MaterielUno Source : Mon club Elec licence CC-By-Sa] == Ressources == === Sur d'autres sites === * Sources et plus de détails : [http://fr.wikipedia.org/wiki/Arduino arduino sur Wikipédia] * [http://www.arduino.cc/fr/ Le site Officiel Arduino en Français] * D' [http://arduino.cc/forum/index.php/topic,67634.0.html autres tutoriels pour débuter] * [http://www.mon-club-elec.fr/pmwiki_reference_arduino/pmwiki.php Un autre site de référence de l'Arduino en Français]utre site de référence de l'Arduino en Français])
- Item:Transitor + (== Historique == Suite aux travaux sur les … == Historique == Suite aux travaux sur les semi-conducteurs, le transistor a été inventé le 23 décembre 1947 par les Américains John Bardeen, William Shockley et Walter Brattain, chercheurs de la compagnie Bell Téléphone1. Ces chercheurs ont reçu pour cette invention le prix Nobel de physique en 1956. Le transistor est considéré comme un énorme progrès face au tube électronique : beaucoup plus petit, plus léger et plus robuste, fonctionnant avec des tensions faibles, autorisant une alimentation par piles, et il fonctionne presque quasi instantanément une fois mis sous tension, contrairement aux tubes électroniques qui demandaient une dizaine de secondes de chauffage, généraient une consommation importante et nécessitaient une source de tension élevée (plusieurs centaines de volts). L'industrialisation vient dès le début des années 19 50, sous l'impulsion de Norman Krim, vice-président de Raytheon. Il est rapidement assemblé, avec d'autres composants, au sein de circuits intégrés, ce qui lui permit de conquérir encore plus de terrain sur les autres formes d'électronique active. == [[http://www.wikidebrouillard.org/index.php?title=Transitor&action=edit§ion=3 modifier]] Expériences scientifiques avec Transitor == Pourquoi ne pas [http://www.wikidebrouillard.org/index.php?title=Nouvelle_page réaliser la fiche expérience] pour Wikidébrouillard !liser la fiche expérience] pour Wikidébrouillard !)
- Item:Compact disc + (== Origine == "Le Compact Disc a été inven … == Origine == "Le Compact Disc a été inventé par Sony et Philips en 1981 afin de constituer un support audio compact de haute qualité permettant un accès direct aux pistes numériques. Il a été officiellement lancé en octobre 1982. En 1984, les spécifications du Compact Disc ont été étendues (avec l'édition du Yellow Book) afin de lui permettre de stocker des données numériques." == [[http://www.wikidebrouillard.org/index.php?title=Compact_Disc&action=edit§ion=3 modifier]] Composition chimique == Voir à cette page Composition du CD avec des schémas [http://www.commentcamarche.net/pc/cdrom.php3 Comment ça marche] == [[http://www.wikidebrouillard.org/index.php?title=Compact_Disc&action=edit§ion=4 modifier]] Propriétés == Voir à cette page fonctionnement et codage du CD [http://www.commentcamarche.net/pc/cdrom.php3 Comment ça marche] == [[http://www.wikidebrouillard.org/index.php?title=Compact_Disc&action=edit§ion=5 modifier]] Expériences qui utilisent ce matériel == Indiquer le '''concept scientifique''' associé à chacune des expériences. === [[http://www.wikidebrouillard.org/index.php?title=Compact_Disc&action=edit§ion=6 modifier]] Sur le Wikidébrouillard === * [http://www.wikidebrouillard.org/index.php?title=Dispersion_de_la_lumi%C3%A8re Dispersion de la lumière] * [http://www.wikidebrouillard.org/index.php?title=A%C3%A9roglisseur Aéroglisseur] === [[http://www.wikidebrouillard.org/index.php?title=Compact_Disc&action=edit§ion=7 modifier]] Autres expériences utilisant ce matériel === Liens internet Pourquoi ne pas [http://www.wikidebrouillard.org/index.php?title=Aide:Aide#Comment_cr.C3.A9er_une_nouvelle_page_.3F réaliser la fiche expérience] pour le Wikidébrouillard ! == [[http://www.wikidebrouillard.org/index.php?title=Compact_Disc&action=edit§ion=8 modifier]] Où le trouver facilement ? == Le récupérer : CD mal gravés, récupérer les CD publicitaires chez les opérateurs internet... == [[http://www.wikidebrouillard.org/index.php?title=Compact_Disc&action=edit§ion=9 modifier]] Utilisations dans la vie quotidienne == * Sert à graver des informations * CD de musique, de jeux, éducatifs... * == Plus d'informations sur Compact Disc == ** [http://fr.wikipedia.org/wiki/Disque_compact Disque compact sur Wikipédia] ** [http://fr.wikipedia.org/wiki/Cat%C3%A9gorie:Stockage_informatique Différents supports de stockage informatique sur Wikipédia] ** [http://www.latribune.fr/info/IDC125724400511009C125733C0067C9F9-$Db=Dossiers/dossier_musique_et_video_sur_internet.nsf Le Compact Disc lutte pour sa survie à l'ère numérique] Dossier la Tribune.fr ** [http://www.groupe-sos.org/conso/cd.php La face cachée du CD] : problème environnemental ** [http://www.usine21.org/IMG/pdf/STS_recyclage-des-cd.pdf Rapport de stage "Recyclage des CD ?"]** [http://www.usine21.org/IMG/pdf/STS_recyclage-des-cd.pdf Rapport de stage "Recyclage des CD ?"])
- Item:Borne NGF + (== Origine == * Ce réseau a été instauré e … == Origine == * Ce réseau a été instauré en France par l'IGN (Institut Géographique National) en 1969 grâce à des données collectées entre 1962 et 1969. Ces données sont recalculées régulièrement ce qui peut impliquer de légères variations entre les valeurs des bornes et les valeurs calculées en dernières. == [[http://www.wikidebrouillard.org/index.php?title=Borne_NGF&action=edit§ion=3 modifier]] Propriétés == Cette convention a été établie afin de simplifier les calculs d'altitude. En France métropolitaine, l'altitude 0 se trouve dans le port de Marseille et en Corse il se situe au niveau du port d'Ajaccio. En métropole, à partir du point défini à Marseille, on a pu définir tous les autres en France. == [[http://www.wikidebrouillard.org/index.php?title=Borne_NGF&action=edit§ion=4 modifier]] Où le trouver facilement ? == Il existe différent moyens pour 'trouver' ces bornes. Il y a encore quelques années, on devait se rendre en mairie de la ville ou commune afin de demander où se trouvait les bornes aux alentours. Une fois l'adresse de la borne (ou les adresses des bornes) récupérée(s), on se rendait sur place et on notait l'altitude. Aujourd'hui, on peut faire sa propre recherche sur internet grâce au [http://www.geoportail.fr/?c=-1.1466,44.225&l=Photo%2880%29,ignpoirepniv&z=6 GéoPortail] mis à disposition par l'IGN. Il suffit d'entrer une adresse (ou simplement une ville), d'avoir coché au moins l'affichage des repères de nivellement dans le catalogue des couches (on peut également afficher les cartes satellites pour faire plus et reconnaître pourquoi pas notre ville) et ensuite de choisir une échelle à la ville (environ) afin de pouvoir voir les petits points jaunes qui correspondent à la localisation des bornes. En cliquant dessus, on affichera l'altitude ainsi qu'un lien vers la localisation de la borne. == [[http://www.wikidebrouillard.org/index.php?title=Borne_NGF&action=edit§ion=5 modifier]] Utilisations dans la vie quotidienne == Ces données conservées et mises à jour par l'IGN, permettent à des chercheurs ou des travailleurs de disposer des données, sans avoir besoin de les recalculer par eux mêmes. Par exemple, les archéologues ont besoin, pour leurs fouilles, de savoir à quelle altitude ils sont, et où ils trouvent les fossiles.es, de savoir à quelle altitude ils sont, et où ils trouvent les fossiles.)
- Item:Chaussure + (== Origine == * Déjà les grecs en leur tem … == Origine == * Déjà les grecs en leur temps portaient des sandales. De nos jours, il en existe différentes formes pour différentes utilités. == [[http://www.wikidebrouillard.org/index.php?title=Chaussure&action=edit§ion=3 modifier]] Composition chimique == * Elles peuvent être en plastique (dérivé du pétrole), en tissu (divers et variés, en bois, en cuir et pour cendrillon elles sont en verre. == [[http://www.wikidebrouillard.org/index.php?title=Chaussure&action=edit§ion=4 modifier]] Propriétés == * Protège nos pieds de la dureté du sol et du froid * Peut avoir un certain attrait esthétique == [[http://www.wikidebrouillard.org/index.php?title=Chaussure&action=edit§ion=5 modifier]] Expériences scientifiques avec Chaussure == == [[http://www.wikidebrouillard.org/index.php?title=Chaussure&action=edit§ion=6 modifier]] Où le trouver facilement ? == * On peut en trouver partout dans des magasins de chaussures. == [[http://www.wikidebrouillard.org/index.php?title=Chaussure&action=edit§ion=7 modifier]] Utilisations dans la vie quotidienne == * On en utilise tous les jours, aussi bien en tant que chaussures de marche ou même à la maison avec des chaussons souvent confortables. chaussures de marche ou même à la maison avec des chaussons souvent confortables.)
- Item:Balle de golf + (== Origine == Autrefois les joueurs de gol … == Origine == Autrefois les joueurs de golf se servaient d'une balle en bois pour jouer. Aujourd'hui les balles ont un noyau en titane recouvert de deux ou trois couches de matériaux synthétiques. De nos jours, nous trouvons différentes catégories de balles pour plusieurs types de parcours pour divers joueurs. == [[http://www.wikidebrouillard.org/index.php?title=Balle_de_golf&action=edit§ion=3 modifier]] Composition chimique == == [[http://www.wikidebrouillard.org/index.php?title=Balle_de_golf&action=edit§ion=4 modifier]] Propriétés == Une balle de golf ne doit pas peser plus de 45,93g et doit avoir un diamètre d'au mois 42,67mm. Chaque type de balle de golf dois être homologué par des instituts spécialisés.de golf dois être homologué par des instituts spécialisés.)
- Item:Carte VATX la petite alimentation de labo + (== Origine == C'est un projet d'un membre … == Origine == C'est un projet d'un membre du fablab de Lannion ([http://fablab-lannion.org/membres/jerome/ Jérôme]). Il en existe de nombreuses autres. == [[http://www.wikidebrouillard.org/index.php?title=Carte_VATX_:_la_petite_alimentation_de_labo&action=edit§ion=3 modifier]] Propriétés == La carte est OpenHardware et peut donc être étudiée, modifiée, distribuée. Tensions fournies : * 3.3V 1A * 5V 1A * 12V 750mA * 1.25-11V 750mA La documentation détaillée se trouve sur le [http://fablab-lannion.org/wiki/index.php?title=VATX wiki du FabLab de Lannion]. == [[http://www.wikidebrouillard.org/index.php?title=Carte_VATX_:_la_petite_alimentation_de_labo&action=edit§ion=4 modifier]] Expériences scientifiques avec Page type matériel == Toute experimentation électronique. == [[http://www.wikidebrouillard.org/index.php?title=Carte_VATX_:_la_petite_alimentation_de_labo&action=edit§ion=5 modifier]] Où le trouver facilement ? == De part sa nature OpenHardware et sa simplicité, il est (relativement) facile de la produire (ou la faire produire soit-même) Sinon, le concepteur en vend régulièrement. Contact via le [http://fablab-lannion.org/wiki/index.php?title=VATX wiki du FabLab de Lannion] == [[http://www.wikidebrouillard.org/index.php?title=Carte_VATX_:_la_petite_alimentation_de_labo&action=edit§ion=6 modifier]] Utilisations dans la vie quotidienne == Experimentation électrique et électronique. Réparations … == [[http://www.wikidebrouillard.org/index.php?title=Carte_VATX_:_la_petite_alimentation_de_labo&action=edit§ion=7 modifier]] Plus d'informations sur Carte VATX : la petite alimentation de labo == Précautions d'utilisation, aspect environnemental du produit, santé humaine... == Précautions d'utilisation, aspect environnemental du produit, santé humaine...)
- Item:Mur végétal + (== Origine == Des structures ciment ou app … == Origine == Des structures ciment ou appareils de pierres maçonnées couvertes de mousses et de quelques plantes existent néanmoins depuis plus de 200 ans avant que le botaniste et chercheur français à CNRS, Patrick Blanc ne crée, teste et développe son concept de mur végétal sur support de feutre. == [[http://www.wikidebrouillard.org/index.php?title=Mur_v%C3%A9g%C3%A9tal&action=edit§ion=3 modifier]] Composition chimique == Les plantes ont besoins : l'eau et les éléments minéraux (SO4, NH4, Ca, Mg, K… dans le sol) absorbés par les racines. Les autres éléments essentiels à la construction des plantes (sucres, protéines…..), sont élaborés par les feuilles à partir de l'eau et du gaz carbonique de l'air, grâce à la photosynthèse. == [[http://www.wikidebrouillard.org/index.php?title=Mur_v%C3%A9g%C3%A9tal&action=edit§ion=4 modifier]] Propriétés == Le mur végétal peut être mis en oeuvre en extérieur comme en intérieur, Il peut se faire soit à partir du sol directement pour les racines de plantes grimpantes, soit en intégrant la flore au bâtiment via aux techniques dites "génie végétal" dont les conditions de colonisation et de pousse des plantes sont faite grâce à des supports de feutre synthétique dans lequel circule de l'eau enrichie en sels nutritifs. == [[http://www.wikidebrouillard.org/index.php?title=Mur_v%C3%A9g%C3%A9tal&action=edit§ion=5 modifier]] Expériences scientifiques avec Mur végétal == Pourquoi ne pas [http://www.wikidebrouillard.org/index.php?title=Nouvelle_page réaliser la fiche expérience] pour Wikidébrouillard ! == [[http://www.wikidebrouillard.org/index.php?title=Mur_v%C3%A9g%C3%A9tal&action=edit§ion=6 modifier]] Où le trouver facilement ? == Le mur végétal est implémenté sous toutes conditions climatiques nécessaires et le choix des espèces de plantes. Par exemple : l’air propre et l'humidité suffisante favorise la prolifération des mousses, lichens... tandis que le lierre et la vigne vierge se plaisent sur un mur sec et dans une atmosphère sèche. == [[http://www.wikidebrouillard.org/index.php?title=Mur_v%C3%A9g%C3%A9tal&action=edit§ion=7 modifier]] Utilisations dans la vie quotidienne == - Dans la nature : dans un milieu naturel en dehors de toute intervention humaine: jardins de rocailles... - Dans la ville : Parc Floral de Paris, Musée Quai Branly de Paris,Square Félix Jacuier de Lyon,Siam Paragon de Bankok... Musée Quai Branly de Paris,Square Félix Jacuier de Lyon,Siam Paragon de Bankok...)
- Item:Cendre + (== Origine == Il s'agit du produit solide … == Origine == Il s'agit du produit solide résultant de feu. Seulement tout les feux ne produisent pas de cendre: exemple le pétrole. Les cendres sont le résultat d'une combustion incomplète. En effet dans le cas d'une combustion complète, toute la matière organique, composée d'atomes de carbone (C), d'oxygène (O) et d'hydrogène (H), réagit pour produire du gaz carbonique et de l'eau sous forme de vapeur. == [[http://www.wikidebrouillard.org/index.php?title=Cendre&action=edit§ion=3 modifier]] Composition chimique == Elle est composé de chaînes de carboné qui peut englober un grand nombre de minéraux suivant les combustibles et comburant. == [[http://www.wikidebrouillard.org/index.php?title=Cendre&action=edit§ion=4 modifier]] Propriétés == == [[http://www.wikidebrouillard.org/index.php?title=Cendre&action=edit§ion=5 modifier]] Expériences qui utilisent ce matériel == Indiquer le '''concept scientifique''' associé à chacune des expériences. === [[http://www.wikidebrouillard.org/index.php?title=Cendre&action=edit§ion=6 modifier]] Sur le Wikidébrouillard === [http://www.wikidebrouillard.org/index.php?title=Combustion_du_sucre Combustion du sucre] === [[http://www.wikidebrouillard.org/index.php?title=Cendre&action=edit§ion=7 modifier]] Autres expériences utilisant ce matériel === Liens internet Pourquoi ne pas [http://www.wikidebrouillard.org/index.php?title=Aide:Aide#Comment_cr.C3.A9er_une_nouvelle_page_.3F réaliser la fiche expérience] pour le Wikidébrouillard ! == [[http://www.wikidebrouillard.org/index.php?title=Cendre&action=edit§ion=8 modifier]] Où le trouver facilement ? == On en récupère après un feu de bois ou de tout autre fibre végétale. == [[http://www.wikidebrouillard.org/index.php?title=Cendre&action=edit§ion=9 modifier]] Utilisations dans la vie quotidienne == Dans la vie quotidienne généralement on les jette, cependant on peut les récupérer comme litière. Autrefois, on en faisait du savon.nt on les jette, cependant on peut les récupérer comme litière. Autrefois, on en faisait du savon.)
- Item:Riz + (== Origine == L'homme a commencé à cultive … == Origine == L'homme a commencé à cultiver le riz il y a près de 10000 ans. Il s'est d'abord développé en Chine puis s'est étendu dans le reste du monde. Le riz est apparu en France, grâce à l'importation à la fin du XIVéme siècle. Il n'est vraiment cultivé qu'à partir du XXéme siècle. == [[http://www.wikidebrouillard.org/index.php?title=Riz&action=edit§ion=3 modifier]] Composition chimique == Le riz est très riche en amidon qui est un sucre lent. L'amidon est de couleur blanchâtre et correspond aux réserves du grain de riz, réserves nécessaires à la germination. == [[http://www.wikidebrouillard.org/index.php?title=Riz&action=edit§ion=4 modifier]] Propriétés == Le riz est une source de magnésium ; il contient entre autres de la vitamine B6, du phosphore, du zinc et du cuivre. Il est cependant pauvre en protéine. Le riz permet de réduire les risques de maladies cardiovasculaire, de diabète et de certains cancers. == [[http://www.wikidebrouillard.org/index.php?title=Riz&action=edit§ion=5 modifier]] Expériences scientifiques avec Riz == == [[http://www.wikidebrouillard.org/index.php?title=Riz&action=edit§ion=6 modifier]] Où le trouver facilement ? == Il se trouve dans tous les magasins alimentaires. == [[http://www.wikidebrouillard.org/index.php?title=Riz&action=edit§ion=7 modifier]] Utilisations dans la vie quotidienne == On s'en sert essentiellement pour se nourrir. Il se mange cuit. On peut le faire nature en accompagnement d'une viande, avec une sauce, ou en dessert : riz au lait, riz au chocolat, gâteau de riz ... == [[http://www.wikidebrouillard.org/index.php?title=Riz&action=edit§ion=8 modifier]] Plus d'informations sur Riz == Information complémentaire sur les divers cultures, les variétés etc : * [http://fr.wikipedia.org/wiki/Riz Article sur wikipedia]rs cultures, les variétés etc : * [http://fr.wikipedia.org/wiki/Riz Article sur wikipedia])
- Item:Bobine de fil d'étain + (== Origine == L'étain était connu dans l'A … == Origine == L'étain était connu dans l'Antiquité sur toute la planète. Le nom d'origine latine stannum ou stagnum fut d'abord utilisé pour un mélange d'argent et de plomb. Les navires phéniciens franchirent les colonnes d'Hercule et allèrent jusqu'en Bretagne et en Cornouaille (les mythiques « îles Cassitérides ») à la recherche des mines d'étain (en grec ancien κασσίτερος). Plus tard, Jules César a décrit l'exploitation de minerais d'étain dans les mines de Cornouailles en Grande-Bretagne. Depuis la Grande-Bretagne, la route de l'étain, passant en Gaule et empruntant le Rhône, faisait partie des objectifs de la conquête césarienne, laquelle était de "sécuriser" cette voie d'approvisionnement - plus exactement en enlever le contrôle aux Gaulois et aux Grecs qui l'exportaient par le port de Massalia (Marseille). == [[http://www.wikidebrouillard.org/index.php?title=Bobine_de_fil_d%27%C3%A9tain&action=edit§ion=3 modifier]] Composition chimique == L'étain est un métal. Pur il est désigné par le symbole Sn. Pour la Brasure (soudure) il est parfois en alliage avec du Plomb ou d'autres métaux. == [[http://www.wikidebrouillard.org/index.php?title=Bobine_de_fil_d%27%C3%A9tain&action=edit§ion=4 modifier]] Propriétés == Brasure (nommé abusivement soudure) : Le métal d'apport est constitué par un alliage, souvent d'étain (à raison de 2 à 63 %) avec le plomb, à bas point de fusion (185 °C). Du fait de la méfiance de plus en plus grande vis-à-vis du plomb, la composition évolue vers des alliages sans plomb, par exemple étain-cuivre ou étain-argent, beaucoup plus chers et nécessitant une température plus élevée (225 °C). De par leur bonne conductivité et de leur relativement basse température de fusion, ces alliages sont très couramment utilisés pour souder des composants électroniques sur des circuits imprimés.er des composants électroniques sur des circuits imprimés.)
- Item:Trame verte + (== Origine == La trame verte est un concep … == Origine == La trame verte est un concept qui dans les pays francophones date des années 1980-1990. Pour les années 1990 à 2005 cette expression couvre des réalités diverses, selon l'époque, le pays, ou le domaine considérés (Urbanisme, Paysage, Environnement, écologie urbaine et autres projets de collectivités locales…). == [[http://www.wikidebrouillard.org/index.php?title=Trame_verte&action=edit§ion=3 modifier]] Composition chimique == Sont considérés comme éléments de trame verte : certaines forêts, les zones humides, les coteaux calcaires, zones dunaires, falaises, haies, dans la mesure où ils constituent des milieux plus épargnés par les impacts des activités humaines ou infrastructures. == [[http://www.wikidebrouillard.org/index.php?title=Trame_verte&action=edit§ion=4 modifier]] Propriétés == Une trame verte a les propriétés de restaurer, protéger et gérer la biodiversité, en favorisant l'auto-entretien, par le maintien des conditions minimales de vie et de circulation nécessaires à la survie des espèces. Elle assure la continuité des espaces verts en les reliant entre eux de manière que les zones soient inter-connectées pour empêcher la perte de biodiversité. == [[http://www.wikidebrouillard.org/index.php?title=Trame_verte&action=edit§ion=5 modifier]] Expériences scientifiques avec Trame verte == Pourquoi ne pas [http://www.wikidebrouillard.org/index.php?title=Nouvelle_page réaliser la fiche expérience] pour Wikidébrouillard ! == [[http://www.wikidebrouillard.org/index.php?title=Trame_verte&action=edit§ion=6 modifier]] Où le trouver facilement ? == == [[http://www.wikidebrouillard.org/index.php?title=Trame_verte&action=edit§ion=7 modifier]] Utilisations dans la vie quotidienne == == [[http://www.wikidebrouillard.org/index.php?title=Trame_verte&action=edit§ion=8 modifier]] Plus d'informations sur Trame verte == La trame verte est dite multi-scalaire, car s’appréciant et fonctionnant à toutes les échelles spatiales: A l’échelle des grands couloirs de migration pour les oiseaux (échelle du paléarctique nord-occidental notamment pour l'Europe de l'ouest), A échelle paysagère (pour les mammifères terrestres), ou à échelle plus locale (berge de rivière, fossé). A différentes échelles administratives (pays, région, pays (au sens de la loi Voynet), Département, Parc naturel régional, Agglomération, ville, etc.; Elle s’apprécie aussi dans le temps : certains corridors ne remplissent leur fonction qu’à certaines époques de l’année, ou ponctuellement lors de migrations imposées par des aléas climatiques ou de type incendies… La '''trame verte''' (ou en France '''Trame verte et bleue''') est un concept qui, dans les pays francophones, date des années 1980-1990 ;est en partie issu des travaux préparatoires au [https://fr.wikipedia.org/wiki/Sommet_de_la_Terre_de_Rio sommet de la Terre de Rio] (1992), de l'[https://fr.wikipedia.org/wiki/%C3%89cologie_du_paysage écologie du paysage] et du projet de [https://fr.wikipedia.org/wiki/R%C3%A9seau_%C3%A9cologique_paneurop%C3%A9en réseau écologique paneuropéen] alors préparé par le [https://fr.wikipedia.org/wiki/Conseil_de_l%27Europe Conseil de l'Europe]. Pour les années 1990 à 2005, cette expression couvre des réalités diverses, selon l'époque, le pays ou le domaine considérés ([https://fr.wikipedia.org/wiki/Urbanisme urbanisme], [https://fr.wikipedia.org/wiki/Paysage paysage], [https://fr.wikipedia.org/wiki/Environnement environnement], [https://fr.wikipedia.org/wiki/%C3%89cologie_urbaine écologie urbaine] et autres projets de [https://fr.wikipedia.org/wiki/Collectivit%C3%A9_territoriale_en_France collectivités locales], etc.). On peut classer les trames vertes en deux catégories : # un réseau plus ou moins physiquement connecté d'[https://fr.wikipedia.org/wiki/Espace_vert espaces verts], sans exigence ou cohérence écologiques fortes, souvent structurés autour de chemins de promenades ou randonnées ; # un [https://fr.wikipedia.org/wiki/Maillage_%C3%A9cologique maillage écologique], local ou régional, dont la conception et le suivi s'appuient sur une approche scientifique et généralement accompagnée d'une cartographie [https://fr.wikipedia.org/wiki/Syst%C3%A8me_d%27information_g%C3%A9ographique SIG] ainsi que d'indicateurs de résultats. Cette dernière catégorie est souvent le fait de villes, ou grandes agglomérations ou pays d'Europe du Nord. C'est le cas en France de la « [https://fr.wikipedia.org/wiki/Trame_verte_et_bleue_fran%C3%A7aise trame verte et bleue française] » en cours d'élaboration depuis la fin des années 1990 dans certaines régions, puis proposée à échelle nationale par le [https://fr.wikipedia.org/wiki/Grenelle_Environnement Grenelle Environnement] (en 2007), préparée par la loi [https://fr.wikipedia.org/wiki/Grenelle_I Grenelle I], et précisée par la loi [https://fr.wikipedia.org/wiki/Grenelle_II Grenelle II]. Des approches intermédiaires existent, telle que la Trame verte et bleue de [https://fr.wikipedia.org/wiki/Bruxelles Bruxelles]. Le concept de trame verte et bleue connaît un grand succès, en Europe et en France (surtout depuis les années 2000). C'est un facteur de [https://fr.wikipedia.org/wiki/Sch%C3%A9ma_r%C3%A9gional_de_coh%C3%A9rence_%C3%A9cologique cohérence écologique], de [https://fr.wikipedia.org/wiki/Coop%C3%A9ration_intercommunale coopération intercommunale] environnementale[https://fr.wikipedia.org/wiki/Trame_verte#cite_note-1 1], mais encore en appropriation par les habitants, élus, techniciens et collectivités. Pour cette raison, il semble mieux traduit dans les [https://fr.wikipedia.org/wiki/Document_d%27urbanisme documents d'urbanisme] (sur le papier) qu'appliqué à grande échelle ou à échelle fine sur le terrain, et en se heurtant parfois à des réglementations contradictoires ou jugées prioritaires[https://fr.wikipedia.org/wiki/Trame_verte#cite_note-2 2] ou à une gouvernance encore très centralisée[https://fr.wikipedia.org/wiki/Trame_verte#cite_note-3 3] qui ne facilite pas le passage des théories scientifiques de l'[https://fr.wikipedia.org/wiki/%C3%89cologie_du_paysage écologie du paysage][https://fr.wikipedia.org/wiki/Trame_verte#cite_note-4 4] à l'action de terrain, en ville, dans les campagnes ou plus encore sur et sous la mer. https://fr.wikipedia.org/wiki/Trame_verte/sup> à l'action de terrain, en ville, dans les campagnes ou plus encore sur et sous la mer. https://fr.wikipedia.org/wiki/Trame_verte)
- Item:Savon + (== Origine == Le savon a été inventé en Sy … == Origine == Le savon a été inventé en Syrie il y a environ 3 000 ans, avec de l'huile d'olive et de la soude végétale. Ce savon était particulièrement réputé pour ses propriétés désinfectantes, dues principalement à l'usage de cendres de laurier dans sa fabrication. Produit de nettoyage connu en Europe depuis l'époque gauloise, il était alors fabriqué à partir de cendres et de suif, mais servait uniquement de shampooing. == [[http://www.wikidebrouillard.org/index.php?title=Savon&action=edit§ion=3 modifier]] Composition chimique == Les matières premières pour fabriquer du savon sont les matières grasses et la soude (ou la potasse). Mais après la réaction de saponification, le savon fini ne contient plus de soude ni d'huile. Il est constitué principalement de carboxylates de sodium (qui sont les molécules de savon) et contient aussi de l'eau. La glycérine (ou glycérol) est un sous-produit de la saponification que l'on peut éliminer. Mais on laisse parfois la glycérine car elle apporte ses propriétés hydratantes au savon. == [[http://www.wikidebrouillard.org/index.php?title=Savon&action=edit§ion=4 modifier]] Propriétés == Le savon est un [http://www.wikidebrouillard.org/index.php?title=Tension_superficielle tensioactif] (voir balade thématique). == [[http://www.wikidebrouillard.org/index.php?title=Savon&action=edit§ion=5 modifier]] Expériences qui utilisent ce matériel == Indiquer le '''concept scientifique''' associé à chacune des expériences. === [[http://www.wikidebrouillard.org/index.php?title=Savon&action=edit§ion=6 modifier]] Sur le Wikidébrouillard === * [http://www.wikidebrouillard.org/index.php?title=Comment_propulser_un_bateau_avec_du_savon_%3F Comment propulser un bateau avec du savon ?] * [http://www.wikidebrouillard.org/index.php?title=Savon,%C3%A0_quoi_%C3%A7a_sert%3F Savon,à quoi ça sert?] === [[http://www.wikidebrouillard.org/index.php?title=Savon&action=edit§ion=7 modifier]] Autres expériences utilisant ce matériel === Liens internet Pourquoi ne pas [http://www.wikidebrouillard.org/index.php?title=Aide:Aide#Comment_cr.C3.A9er_une_nouvelle_page_.3F réaliser la fiche expérience] pour le Wikidébrouillard ! == [[http://www.wikidebrouillard.org/index.php?title=Savon&action=edit§ion=8 modifier]] Où le trouver facilement ? == * Dans la cuisine * Dans la salle de bain * Au supermarché * Le fabriquer : [http://hooly.over-blog.com/article-1326625.html Fabriquer ses savons maison par Hooly] == [[http://www.wikidebrouillard.org/index.php?title=Savon&action=edit§ion=9 modifier]] Utilisations dans la vie quotidienne == Sert à se laver, à nettoyer.avon&action=edit§ion=9 modifier]] Utilisations dans la vie quotidienne == Sert à se laver, à nettoyer.)
- Item:Fil de fer + (== Origine == Une de ses première grandes … == Origine == Une de ses première grandes utilisation est sous forme de fil barbelé pour empécher l'accès en cas de guerre ou pour parquer les animaux. == [[http://www.wikidebrouillard.org/index.php?title=Fil_de_fer&action=edit§ion=3 modifier]] Composition chimique == Il est constitué à l'origine que de fer (de formule chimique Fe) mais est aujourd'hui au minimum inoxydable. == [[http://www.wikidebrouillard.org/index.php?title=Fil_de_fer&action=edit§ion=4 modifier]] Propriétés == Solide mais tord simplement avec une force humaine. == [[http://www.wikidebrouillard.org/index.php?title=Fil_de_fer&action=edit§ion=5 modifier]] Expériences qui utilisent ce matériel == * [http://www.wikidebrouillard.org/index.php?title=Combustion_spontan%C3%A9e Combustion spontanée] * [http://www.wikidebrouillard.org/index.php?title=R%C3%A9action_en_cha%C3%AEne Réaction en chaîne] == [[http://www.wikidebrouillard.org/index.php?title=Fil_de_fer&action=edit§ion=6 modifier]] Où le trouver facilement ? == On le retrouve souvent dan la vie de tout les jours parfois recouvert de plastique pour lui donner un toucher plus chaud et une couleur. Le pus simple est de récupérer un cintre bas de gamme que l'on donne en pressing par exemple. On le trouve aussi par rouleau au rayon bricolage. == [[http://www.wikidebrouillard.org/index.php?title=Fil_de_fer&action=edit§ion=7 modifier]] Utilisations dans la vie quotidienne == On l'utilise très souvent en rouleau pour le bricolage. == [[http://www.wikidebrouillard.org/index.php?title=Fil_de_fer&action=edit§ion=8 modifier]] Plus d'informations sur Fil de fer == Il se coupe à l'aide de tennaille de bricolage ou en le tordant de multiples fois au même endroit.upe à l'aide de tennaille de bricolage ou en le tordant de multiples fois au même endroit.)
- Item:Pinceau + (== Origine == Utilisé environ 2000 ans ava … == Origine == Utilisé environ 2000 ans avant Jésus-Christ par les chinois, les pinceaux n'étaient à leur début, que de simples tiges de bambou (bois creux) dans lesquelles étaient placé des touffes de poils d'animaux. Au fil du temps et selon le pays, les pinceaux évoluèrent aussi bien au niveau du matériel utilisé pour la tige rigide, que pour les fibres fixées au bout, ainsi que la technique utilisé pour fixer les poils au bout du manche. == [[http://www.wikidebrouillard.org/index.php?title=Pinceau&action=edit§ion=3 modifier]] Composition == Le pinceau est un instrument composé d'une tige principalement en bois au bout de laquelle se trouve des fibres. Ces fibres peuvent être de différentes origines : * animale : poils de mangouste, de martre, de martrette, de petit-gris, etc… * synthétique : poils synthétiques tel que le nylon, etc… Le maintient des fibres peut également varier selon le pinceau : * collé * attaché à l'aide d'une ficelle * virole (bague de métal). == [[http://www.wikidebrouillard.org/index.php?title=Pinceau&action=edit§ion=4 modifier]] Expériences qui utilisent ce matériel sur Wikidébrouillard == * [http://www.wikidebrouillard.org/index.php?title=Sarbacane_m%C3%A9gapuissante_%C3%A0_air_comprim%C3%A9 Sarbacane mégapuissante à air comprimé] * [http://www.wikidebrouillard.org/index.php?title=Qu%27y_a-t-il_dans_le_sol_%3F Qu'y a-t-il dans le sol ?] == [[http://www.wikidebrouillard.org/index.php?title=Pinceau&action=edit§ion=5 modifier]] Utilisations dans la vie quotidienne == Les artistes ou bricoleurs les utilisent pour peindre. En cuisine, le pinceau est utilisé pour dorer une pâte, c'est à dire étaler une fine couche de jaune d'oeuf sur une pâte, afin de lui offrir un aspect brillant après la cuisson. == [[http://www.wikidebrouillard.org/index.php?title=Pinceau&action=edit§ion=6 modifier]] Où le trouver facilement ? == * Dans les papeterie. * Dans les trousses des écoliers. * Dans les ateliers des artistes, les garages des bricoleurs. * Dans les cuisines. * etc...rs des artistes, les garages des bricoleurs. * Dans les cuisines. * etc...)
- Item:Nappe + (== Où le trouver facilement ? == * Dans un … == Où le trouver facilement ? == * Dans une salle a manger * Dans une cuisine == [[http://www.wikidebrouillard.org/index.php?title=Nappe&action=edit§ion=8 modifier]] Utilisations dans la vie quotidienne == La nappe est utilisée pour recouvrir une table afin d'eviter que la table soit en contact avec toutes projection de liquide. == [[http://www.wikidebrouillard.org/index.php?title=Nappe&action=edit§ion=9 modifier]] Plus d'informations sur Nappe == Précautions d'utilisation, aspect environnemental du produit, santé humaine...ation, aspect environnemental du produit, santé humaine...)
- Item:Eau oxygéné + (== composition chimique == H2O2 2 atomes … == composition chimique == H2O2 2 atomes d'hydrogène pour 2 atomes d'oxygène. == [[http://www.wikidebrouillard.org/index.php?title=Eau_oxyg%C3%A9n%C3%A9e&action=edit§ion=4 modifier]] Propriétés == Utilisé couramment désinfectant. Utilisé également comme décolorant des diverses sortes de poils (moustache, cheveux, ...) d'où le nom de Blonde "Peroxydée" dont on qualifiait Marilyne Monroe ! == [[http://www.wikidebrouillard.org/index.php?title=Eau_oxyg%C3%A9n%C3%A9e&action=edit§ion=5 modifier]] Expériences qui utilisent ce matériel == * [http://www.wikidebrouillard.org/index.php?title=Le_g%C3%A9nie_sort_de_la_bouteille Le génie sort de la bouteille] * [http://www.wikidebrouillard.org/index.php?title=Oxyg%C3%A8ne Oxygène] == [[http://www.wikidebrouillard.org/index.php?title=Eau_oxyg%C3%A9n%C3%A9e&action=edit§ion=6 modifier]] Où la trouver facilement ? == On en trouve en pharmacie ou au supermarché au rayon parapharmacie.n en trouve en pharmacie ou au supermarché au rayon parapharmacie.)
- Item:Couvercle + (=== Cuisine === En [https://fr.wikipedia.o … === Cuisine === En [https://fr.wikipedia.org/wiki/Cuisine cuisine], ce terme désigne l'[https://fr.wikipedia.org/wiki/Liste_des_ustensiles_de_cuisine ustensile de cuisine] qui sert à couvrir un récipient de cuisson ([https://fr.wikipedia.org/wiki/Casserole casserole], [https://fr.wikipedia.org/wiki/Marmite_(ustensile) marmite], [https://fr.wikipedia.org/wiki/Cocotte_(cuisine) cocotte]...). Sur des [https://fr.wikipedia.org/wiki/Cocotte-minute cocotte-minutes] (ou autocuiseur), l'intérieur du couvercle est en relief pour faire redescendre la [https://fr.wikipedia.org/wiki/Vapeur_d%27eau vapeur] condensée en pluie. Il existe des couvercles perforés pour l'évacuation de la vapeur ou pour un égouttage. Cependant, comme ustensile de cuisine, le couvercle permet de chauffer plus rapidement le contenu en concentrant la chaleur ; il garde au chaud ou permet de mijoter à feu doux. === Emballage === En [https://fr.wikipedia.org/wiki/Emballage emballage], le rôle du couvercle est de protéger le contenu entre deux utilisations. Il y a des couvercles à charnière (par exemple boîtes en carton pour la lessive en poudre ou boîte à thé en métal). Il y a des couvercles emboîtés (pot de peinture) et des couvercles clipsés (barquette de beurre). C'est l'élasticité du matériau qui assure la fermeture et l'étanchéité. Il y a des couvercles vissés, en métal ou en plastique qu'on appelle parfois [https://fr.wikipedia.org/wiki/Capsule_%C3%A0_vis capsule], voir photo. Souvent, le couvercle abrite un [https://fr.wikipedia.org/wiki/Opercule_(emballage) opercule] étanche qu'on ôte à la première utilisation, il garantit l'inviolabilité du contenu et sa conservation parfaite. À la différence d'un couvercle, un opercule ordinaire n'est pas repositionnable. Source sous licence CC-By-Sa - [https://fr.wikipedia.org/wiki/Couvercle Wikipédia]fr.wikipedia.org/wiki/Couvercle Wikipédia])
- Item:Mini imprimante thermique + (=== Spécifications === * Printing method : … === Spécifications === * Printing method : Thermal * Resolution: 8 dots / mm , 384 dots / line * Effective print width: 48mm * Character set: ASCII, GB2312-80 ( Chinese ) * Print fonts: ANK: 5 x 7, Chinese: 12 x 24, 24 x 24 * Paper type: Thermal paper * Paper width: 57.5 +/- 0.5mm * Roll diameter: 30mm ( max ) * Reliability: Mean Cycle Between Failure ( MCBF ) 500 million lines * Interface: Serial ( RS-232, TTL ), parallel * Embed depth: 43mm * Power supply ( Adapter ): DC 5V - 9V * Installation port size: 77 x 53mm * Operating temperature: 5 Deg.C - 50 Deg.C * Humidity: 10 percent to 80 percent * Storage temperature: -20 Deg.C - 60 Deg.C * Storage humidity: 10 percent to 90 percent * Print speed: 50 - 85mm / s * Package weight: 0.179 kg * Product size: 8.20 x 5.80 x 4.40 cm / 3.23 x 2.28 x 1.73 inches * Package size: 9.00 x 6.50 x 5.00 cm / 3.54 x 2.56 x 1.97 inches * Packing Contents: 1 x 58mm Micro Embedded Receipt Thermal Printer, 1 x Bag of Installtion Accessory (cable USB mini + Plus petits cables d'alimentation et données + dispositif de fixation) == [[http://www.wikidebrouillard.org/index.php?title=Mini_imprimante_thermique&action=edit§ion=5 modifier]] Des tutoriels == * (en) http://tronixstuff.com/2011/07/08/tutorial-arduino-and-a-thermal-printer/ * (en) http://newsinternational.github.io/iot-assistant/ * (en) https://github.com/exciting-io/printer/wiki/Making-your-own-printer-with-an-Arduino == [[http://www.wikidebrouillard.org/index.php?title=Mini_imprimante_thermique&action=edit§ion=6 modifier]] des forum == * (en) https://forums.adafruit.com/viewtopic.php?f=25&t=60801&p=308161&hilit=thermal+printer+accent#p308161 == [[http://www.wikidebrouillard.org/index.php?title=Mini_imprimante_thermique&action=edit§ion=7 modifier]] liens vers des projets == * https://exciting.io/2012/04/12/hello-printer/ * https://github.com/exciting-io/printer/wiki/Making-your-own-printer-with-an-Arduino * http://hackaday.com/tag/thermal-printer/ * https://cdn-learn.adafruit.com/downloads/pdf/mini-thermal-receipt-printer.pdf * http://newsinternational.github.io/iot-assistant/ * https://learn.adafruit.com/internet-of-things-printer/parts-list * https://www.adafruit.com/products/597/internet-of-things-printer/parts-list * https://www.adafruit.com/products/597)
- Item:Vinaigre blanc + (===Le vinaigre blanc, aussi appelé "vinaig … ===Le vinaigre blanc, aussi appelé "vinaigre cristal" est produit à partir de la distillation de vinaigre de malt (obtenu par fermentation de grains d'orge) ou de vinaigre d'alcool obtenu par fermentation d'amidon de maïs, ou encore en mélangeant de l'acide acétique avec de l'eau.=== ==[[http://www.wikidebrouillard.org/index.php?title=Vinaigre_blanc&action=edit§ion=2 modifier]] Origine== L'origine du vinaigre remonte à... longtemps. ==[[http://www.wikidebrouillard.org/index.php?title=Vinaigre_blanc&action=edit§ion=3 modifier]] Composition chimique== Contenant de l'acide acétique de formule CH3COOH, le vinaigre blanc est plus ou moins dilué dans de l'eau (H2O). ==[[http://www.wikidebrouillard.org/index.php?title=Vinaigre_blanc&action=edit§ion=4 modifier]] Propriétés== Le vinaigre blanc est incolore et acide, son pH varie généralement entre 2 et 3 selon sa concentration en acide acétique. ==[[http://www.wikidebrouillard.org/index.php?title=Vinaigre_blanc&action=edit§ion=5 modifier]] Expériences scientifiques avec Vinaigre blanc== Pourquoi ne pas [http://www.wikidebrouillard.org/index.php?title=Nouvelle_page réaliser la fiche expérience] pour Wikidébrouillard ! ==[[http://www.wikidebrouillard.org/index.php?title=Vinaigre_blanc&action=edit§ion=6 modifier]] Où le trouver facilement ?== Facile à trouver dans le commerce, en particulier en supermarché, il est généralement vendu en bouteilles d'un litre. ==[[http://www.wikidebrouillard.org/index.php?title=Vinaigre_blanc&action=edit§ion=7 modifier]] Utilisations dans la vie quotidienne== Le vinaigre blanc peut être utilisé, pur ou dilué, de multiples façons, comme pour détartrer les surfaces telles que baignoires ou WC, mais aussi les casseroles (il dissout le calcaire), adoucir le linge ou supprimer les taches, dégraisser les carrelages, blanchir les joints, désherber, améliorer la brillance des cheveux, chasser une odeur tenace sur une moquette ou dans une poubelle... ==[[http://www.wikidebrouillard.org/index.php?title=Vinaigre_blanc&action=edit§ion=8 modifier]] Plus d'informations sur Vinaigre blanc== Le vinaigre blanc est écologique, il peut avantageusement remplacer de nombreux produits d'entretien sans générer de résidus polluants dans l'eau ou les sols. ===Pour l'entretien de la maison=== Souvent mentionné en tant qu'ingrédient dans certaines recettes, le vinaigre blanc est un remarquable [http://www.ekopedia.fr/wiki/Nettoyant_multi-usages nettoyant multi-usages] pour l'[http://www.ekopedia.fr/wiki/Entretien_de_la_maison entretien de la maison]. Étant un produit acide, il possède des propriétés de dé-calcairisation, [http://www.ekopedia.fr/wiki/D%C3%A9tartrant détartrant] et [http://www.ekopedia.fr/wiki/Adoucissant adoucissant] pour l'[http://www.ekopedia.fr/wiki/Eau eau]. Il a également un certain pouvoir [http://www.ekopedia.fr/index.php?title=D%C3%A9sinfectant&action=edit&redlink=1 désinfectant] et [http://www.ekopedia.fr/index.php?title=D%C3%A9graissant&action=edit&redlink=1 dégraissant]. Il possède l'avantage, par rapport aux autres [http://www.ekopedia.fr/wiki/Vinaigre vinaigres], d'être incolore et pas cher. Correctement dosé, son odeur âpre disparaît rapidement après utilisation. Il peut même être [http://www.ekopedia.fr/wiki/R%C3%A9utilisation réutilisé], par exemple en filtrant et récupérant le vinaigre d'un bocal de cornichons terminé pour l'utiliser comme [http://www.ekopedia.fr/wiki/D%C3%A9tartrant détartrant]. *'''Détartrage''' : Pour les éviers, la robinetterie, les vitres de douche, les [http://www.ekopedia.fr/wiki/Toilettes toilettes] mais aussi les cafetières, les bouilloires et les casseroles (il est parfait pour faire briller le [http://www.ekopedia.fr/wiki/Cuivre cuivre]). Le vinaigre blanc permet également de lutter contre le calcaire dans le [http://www.ekopedia.fr/wiki/Lave-linge lave-linge] et contre le linge rêche : soit en faisant tourner la machine une fois à vide (mais attention aux dépenses d'[http://www.ekopedia.fr/wiki/Gestion_de_l%27%C3%A9nergie énergie] engendrées) avec du vinaigre blanc placé dans les bacs à lessive et à adoucissant, soit en ajoutant systématiquement du vinaigre blanc (à raison de 2 cuillères à café par tournée) dans le bac à adoucissant (et à la place d'un adoucissant industriel), ce qui provoque un véritable effet [http://www.ekopedia.fr/index.php?title=Assouplissant&action=edit&redlink=1 assouplissant] sur le linge. Voir aussi l'article sur les [http://www.ekopedia.fr/wiki/D%C3%A9tartrant détartrants]. *'''Désinfection et désodorisation''' : On applique du vinaigre blanc dans le [http://www.ekopedia.fr/wiki/R%C3%A9frig%C3%A9rateur réfrigérateur] pour le désinfecter après l'avoir nettoyé. De la même façon, on peut pulvériser du vinaigre (pur ou mélangé à de l'eau) dans et sur la poubelle propre. Il attaque aussi les moisissures. Attention toutefois, il ne s'agit pas d'un antiseptique total ; pour les [http://www.ekopedia.fr/wiki/Bact%C3%A9rie bactéries] résistantes à l'acide, employez plutôt de l'[http://www.ekopedia.fr/wiki/Alcool alcool] ou un autre produit. Le vinaigre est aussi un [http://www.ekopedia.fr/wiki/D%C3%A9sodorisant désodorisant] qui chasse les mauvaises odeurs. On le vaporise dans les [http://www.ekopedia.fr/wiki/Toilettes toilettes] ou encore aux abords de la poubelle. *'''Dégraissage''' : Le vinaigre élimine la graisse, nettoie les plans de travail, la crédence, le carrelage, le [http://www.ekopedia.fr/wiki/Verre verre], les miroirs ainsi que les [http://www.ekopedia.fr/wiki/Nettoyage_des_vitres vitres]. Le vinaigre élimine également les taches de [http://www.ekopedia.fr/wiki/Cire cire]. *'''Mélanges''' : Pour décoller des résidus alimentaires brûlés ou agglutinés dans l'évacuation d'un évier bouché, on peut y mettre du bicarbonate de soude puis du vinaigre blanc. L'effervesence provoquée facilitera amplement le nettoyage. Attention : Malgré ce qui se lit fréquemment sur les blogs, on évitera de mélanger dans un même flacon vinaigre blanc et bicarbonate de soude (acide + base) car l'efficacité du liquide obtenu sera moindre voire nulle. ===Autres utilisations=== *'''photographie''' : Le vinaigre blanc peut également utilisé comme bain d'arrêt pour le développement de photographies argentiques. Cette étape a pour but de stopper l'action du produit révélateur). Le vinaigre blanc est alors dilué dans de l'eau afin d'obtenir une solution dont le [http://www.ekopedia.fr/wiki/PH pH] est situé entre 4 et 5,5 ; plus acide, il détériore le négatif, moins acide on obtient une mauvaise fixation de l'image. *'''Litières pour animaux''' : Le vinaigre blanc peut aussi servir à détartrer et désinfecter des litières. Il suffit de laisser tremper quelques instants du vinaigre pur ou mélangé à de l'eau, juste de quoi recouvrir le fond du bac à litière et ensuite utiliser une brosse ou un tampon (vert ou en inox ou cuivre tissé) pour frotter doucement ; bien rincer ensuite. Le vinaigre blanc n'étant pas toxique pour les chats, ce procédé peut être répété chaque semaine. *'''Contre les poux''' : En effet, l'acidité tue les œufs de ces adorables petites bêtes. Faire légèrement chauffer du vinaigre, le faire tiédir et l'appliquer en shampoing. Ensuite, mettre un sac plastique sur la chevelure pour bien l'enfermer et laisser agir 1/2 heure avant de rincer. *'''Après-shampoing''' : Après avoir lavé et rincé convenablement ses cheveux, un mélange d'eau et de vinaigre (blanc ou de cidre) peut faire office d'après-shampoing dont l'odeur disparaîtra totalement quelques instants plus tard. A raison d'un demi-litre d'eau tiède et d'une cuillerée à café de vinaigre environ, le mélange sera versé lentement à partir du crâne sur toute la chevelure afin de l'assouplir et en guise de dernier rinçage. Attention à éviter les yeux. à partir du crâne sur toute la chevelure afin de l'assouplir et en guise de dernier rinçage. Attention à éviter les yeux.)
- Item:Sac plastique + (Au début du <abbr class="abbr" title="2 … Au début du XXIe siècle, leur fabrication absorbe environ 4 % de la consommation annuelle de pétrole. Ces sacs, notamment ceux qui sont non biodégradables, posent de nombreux problèmes environnementaux, et particulièrement dans l'environnement marin, ce qui conduit à leur interdiction progressive par de nombreux pays. Le sac plastique est le plus souvent constitué de polyéthylène d'origine pétrolière. Des sacs biodégradables (en amidon de pomme de terre et de maïs, à base de sucre de betterave ou d'huile de tournesol…), ainsi que les sacs en papier recyclables sont des alternatives. Il existe aussi des sacs conçus pour se fragmenter en morceaux de plus en plus petits après exposition à la lumière (dits « oxofragmentable », ou « oxodégradables » grâce à un additif généralement à base de cobalt, métal toxique et écotoxique).ditif généralement à base de cobalt, métal toxique et écotoxique).)
- Item:Capteur de température + (Au départ la température a un lien avec la … Au départ la température a un lien avec la sensation de chaud et de froid. Par ailleurs les premiers thermoscopes étaient gradués en très chaud, chaud, tempéré, froid, très froid. Mais très vite nous pouvons voir les limites de cette notion. En effet si vous plongez la main dans de l'eau froide puis dans de l'eau tiède, celle-ci vous paraitra chaude maintenant plongez la main dans de l'eau chaude et remettez-la dans la même eau tiède celle-ci vous paraitra plus froide qu'après. Cette notion n'étant ni précise,ni fidèle, les scientifiques ont voulu trouver un autre moyen de définir et de mesurer la température. La physique statistique définit la température comme un degré d'agitation des atomes et/ou des molécules. Un peu plus tard viendra la notion de désordre avec l'entropie. La thermodynamique apporte une énorme contribution dans la définition de la température. En effet celle-ci est introduite par Sadi Carnot en 1824 dans la notion de machine thermique parfaite décrite par un cycle. Dans cette notion le rapport de températures est défini par un rapport d'énergies. La température est une grandeur intensive, c'est-à-dire qu'elle traduit un "état" du système étudié au même titre qu'une tension électrique, une altitude ou un potentiel chimique, etc. On peut comparer les valeurs d'une grandeur intensive de deux systèmes, mais on ne peut pas en faire la somme. Une grandeur intensive est un potentiel d'où dérive un champ. À une grandeur intensive est associée une grandeur extensive. En thermique, la grandeur extensive associé à la température est l'entropie. Afin de mesurer la température il est nécessaire que le capteur mesure une grandeur physique qui dépend de la température de l'élément à mesurer. C'est-à-dire qu’il existe une relation mathématique qui relie la grandeur G à la température :qui relie la grandeur G à la température :)
- Item:Laine d'acier + (Bon marché, la paille de fer, ou plus comm … Bon marché, la paille de fer, ou plus communément appelée '''laine d'acier''', '''tampon Jex''' ou '''[https://fr.wikipedia.org/wiki/3M Scotch-Brite]''', est particulièrement utilisée pour le [https://fr.wikipedia.org/wiki/Propret%C3%A9 nettoyage] de surfaces très sales mais non abrasées par le frottement de la paille de fer. Typiquement, on peut s'en servir pour le récurage de [https://fr.wikipedia.org/wiki/Casserole casseroles] et de [https://fr.wikipedia.org/wiki/Po%C3%AAle_(cuisine) poêles], ou pour supprimer certaines salissures tenaces sur les carrelages ou des tables et autres meubles. Dans nombre de cas, elle remplace avantageusement les détergents, et même l'eau chaude, allant jusqu'à rendre superflus les revêtements anti-adhésion des poêles à frire. Pour nettoyer la paille de fer elle-même une fois qu'elle a été utilisée sur des taches très grasses, on peut la passer au [https://fr.wikipedia.org/wiki/Lave-vaisselle lave-vaisselle].a.org/wiki/Lave-vaisselle lave-vaisselle].)
- Item:Thermomètre + (C'est dans le courant du [https://fr.wikip … C'est dans le courant du [https://fr.wikipedia.org/wiki/XVIIIe_si%C3%A8cle XVIIIe siècle] que l'invention de différents types de thermomètre prit son essor dans plusieurs pays d'Europe. Vers 1700, [https://fr.wikipedia.org/wiki/Isaac_Newton Isaac Newton] (1642–1727) se consacra au problème de la [https://fr.wikipedia.org/wiki/Transfert_thermique chaleur]. Il élabora une première [https://fr.wikipedia.org/wiki/%C3%89chelle_(mesure) échelle] de [https://fr.wikipedia.org/wiki/Temp%C3%A9rature température] qualitative, consistant en une vingtaine de points de référence allant de « l'air froid en hiver » jusqu'aux « charbons ardents du feu de cuisine ». Cette façon de faire étant grossière et problématique, Newton en devient vite insatisfait. Au bout d'un certain temps, il définit « zéro degré de chaleur » comme correspondant à la neige fondante et « 33 degrés de chaleur » comme correspondant à l'eau bouillante. En 1702, l'astronome [https://fr.wikipedia.org/wiki/Ole_Christensen_R%C3%B8mer Ole Christensen Rømer] fabriqua, au [https://fr.wikipedia.org/wiki/Danemark Danemark], un thermomètre à alcool marquant l'eau bouillante à 60° et la glace pilée à 7,5°. En 1717, le savant allemand [https://fr.wikipedia.org/wiki/Daniel_Gabriel_Fahrenheit Daniel Gabriel Fahrenheit] remplaça l'[https://fr.wikipedia.org/wiki/%C3%89thanol alcool] par du [https://fr.wikipedia.org/wiki/Mercure_(chimie) mercure] et donna au thermomètre sa forme définitive. Il proposa également la première échelle de températures à être adoptée assez largement, fixant à 32 °F la température de la glace fondante et à 96 °F la température normale du [https://fr.wikipedia.org/wiki/Sang sang] : 32 °F est alors le point de fusion de la glace et 212 °F est le point d'ébullition de l'eau sous pression atmosphérique normale. En 1730, [https://fr.wikipedia.org/wiki/Ren%C3%A9-Antoine_Ferchault_de_R%C3%A9aumur René-Antoine Ferchault de Réaumur], physicien et naturaliste français, construisit un thermomètre à « esprit de vin » (ancienne dénomination de l'[https://fr.wikipedia.org/wiki/%C3%89thanol éthanol]), pour lequel il utilisa l'échelle 0-80, le zéro étant le point de congélation de l'eau, et le 80 est le point d'ébullition de l'alcool (esprit de vin), que Réaumur tendait à confondre avec le point d'ébullition de l'eau[https://fr.wikipedia.org/wiki/Thermom%C3%A8tre#cite_note-6 6]. L'[https://fr.wikipedia.org/wiki/Astronome astronome] français [https://fr.wikipedia.org/wiki/Joseph-Nicolas_Delisle Joseph-Nicolas Delisle], invité à travailler en [https://fr.wikipedia.org/wiki/Russie Russie] par [https://fr.wikipedia.org/wiki/Pierre_Ier_de_Russie Pierre le Grand], y fabriqua des thermomètres. Son échelle avait son zéro au point d'ébullition de l'eau et mesurait la contraction du mercure. En 1738, Josias Weitbrecht (1702–1747) recalibra l'échelle Delisle en fixant à 150 degrés le point de congélation de l'eau. Les thermomètres Delisle sont restés en usage en Russie pendant près d'un siècle. Le physicien suédois [https://fr.wikipedia.org/wiki/Anders_Celsius Anders Celsius] fit construire en 1741 un thermomètre à [https://fr.wikipedia.org/wiki/Mercure_(chimie) mercure], gradué de sorte que 100° correspondit au point de [https://fr.wikipedia.org/wiki/Cong%C3%A9lation congélation] de l'eau, et 0° à son point d'[https://fr.wikipedia.org/wiki/%C3%89bullition ébullition], qui fut utilisé de 1742 à 1750 à l’observatoire d’[https://fr.wikipedia.org/wiki/Uppsala Uppsala][https://fr.wikipedia.org/wiki/Thermom%C3%A8tre#cite_note-evo-3 3]. L'échelle de Celsius était donc graduée en sens inverse de l'échelle centigrade que nous connaissons actuellement. Ce n'est qu'après la mort de Celsius, survenue en 1744, que ses collègues — on pense que l'initiative en revient surtout au célèbre [https://fr.wikipedia.org/wiki/Naturaliste naturaliste] suédois [https://fr.wikipedia.org/wiki/Carl_von_Linn%C3%A9 Carl von Linné]— inversèrent l'échelle de Celsius pour lui donner sa forme actuelle, à savoir 0 pour la température de fusion de la glace, et 100 pour la température d'ébullition de l'eau. De fait, en 1745, Linné présenta à l'académie suédoise un thermomètre à mercure qui marquait 0° pour la glace fondante et 100° pour l'eau bouillante[https://fr.wikipedia.org/wiki/Thermom%C3%A8tre#cite_note-evo-3 3]. Cependant, à la même époque, le secrétaire perpétuel de l’académie des Beaux-Arts de Lyon, [https://fr.wikipedia.org/wiki/Jean-Pierre_Christin Jean-Pierre Christin] (1683-1755), faisait construire par l’artisan lyonnais Pierre Casati un thermomètre à mercure à échelle centésimale ascendante, qu’il présenta le 19 mars 1743 à l’assemblée publique de cette académie. On attribua donc souvent à tort l'inversion de l'échelle mise au point par Celsius à Christin[https://fr.wikipedia.org/wiki/Thermom%C3%A8tre#cite_note-7 7],[https://fr.wikipedia.org/wiki/Thermom%C3%A8tre#cite_note-8 8]. Le thermomètre suédois de Celsius et le thermomètre lyonnais de Christin-Casati n’auraient eu qu’une utilisation restreinte si la [https://fr.wikipedia.org/wiki/R%C3%A9volution_fran%C3%A7aise Révolution française] n’avait donné au monde moderne le [https://fr.wikipedia.org/wiki/Syst%C3%A8me_m%C3%A9trique système métrique], et si la Commission des poids et mesures, créée par la [https://fr.wikipedia.org/wiki/Convention_nationale Convention], n’avait décidé en 1794 que « le degré thermométrique sera[it] la centième partie de la distance entre le terme de la [https://fr.wikipedia.org/wiki/Glace glace] et celui de l’[https://fr.wikipedia.org/wiki/Vapeur_d%27eau eau bouillante] ». === La plupart des thermomètres mesurent leur propre température (celle de sa partie qui sert à faire la mesure). Cette température n'est celle du milieu ambiant que s'il y a équilibre thermique entre le thermomètre et le milieu ambiant. Cela signifie par exemple, que si un thermomètre est exposé au [https://fr.wikipedia.org/wiki/Soleil soleil], il sera plus chaud que l'air, et que cet écart de température dépendra entièrement de sa couleur et de sa ventilation, et donc qu'une température mesurée dans ces conditions sera totalement fantaisiste par rapport à la température de l'[https://fr.wikipedia.org/wiki/Air air]. (C'est pour cela que les météorologues mesurent la température sous [https://fr.wikipedia.org/wiki/Abri_Stevenson abri ventilé].) === * [http://www.wikidebrouillard.org/index.php?title=Isolation_Thermique Isolation Thermique] : comment retenir la chaleur le plus longtemps possible dans le récipient ? * [http://www.wikidebrouillard.org/index.php?title=Effet_de_serre Effet de serre] : expérience pour illustrer l’effet de serre * [http://www.wikidebrouillard.org/index.php?title=Four_solaire Four solaire] : utiliser le soleil source d’énergie ! * [http://www.wikidebrouillard.org/index.php?title=Noir_ou_blanc_%3F Noir ou blanc ?] : faut-il mieux utiliser le noir ou le blanc dans les équipements solaires ? * [http://www.wikidebrouillard.org/index.php?title=Laine_comme_isolant Laine comme isolant] : Pourquoi utiliser de la laine comme isolant ? * [http://www.wikidebrouillard.org/index.php?title=Un_m%C3%A9lange_qui_chauffe Un mélange qui chauffe] === [[http://www.wikidebrouillard.org/index.php?title=Thermom%C3%A8tre&action=edit§ion=7 modifier]] ailleurs sur le Web === * [http://www.cea.fr/videos/experiences/mesurer_la_temperature_le_thermometre Expériences sur le site du CEA] == [[http://www.wikidebrouillard.org/index.php?title=Thermom%C3%A8tre&action=edit§ion=8 modifier]] Fabrication d'un thermomètre == * [http://www.wikidebrouillard.org/index.php?title=Thermometre_%C3%A0_eau Thermometre à eau] : comment fabriquer un thermomètre avec une bouteille d'eau ? == [[http://www.wikidebrouillard.org/index.php?title=Thermom%C3%A8tre&action=edit§ion=9 modifier]] Où le trouver facilement ? == tout dépendra de l'usage : * en pharmacie * on trouve sur internet des sites spécialisés en stations météorologiques... == [[http://www.wikidebrouillard.org/index.php?title=Thermom%C3%A8tre&action=edit§ion=10 modifier]] Utilisations dans la vie quotidienne == * sert à prendra la température * utilisé en médecine, en météorologie, en cuisine... == [[http://www.wikidebrouillard.org/index.php?title=Thermom%C3%A8tre&action=edit§ion=11 modifier]] Plus d'informations sur Thermomètre == Les thermomètres à mercure, longtemps en usage, ont été progressivement retirés de la vente à cause de la toxicité du mercure.)
- Item:Huile de coco + (C'est un produit multifonctions qui s'util … C'est un produit multifonctions qui s'utilise aussi bien en cuisine que dans les produits cosmétiques. L’huile de coco fait partie des indispensables ingrédients à avoir chez soi, si on se lance dans la confection de '''produits cosmétiques naturels''' « maison ». C’est la base de nombreux soins pour visage et corps, mais aussi pour cheveux. Pour en faire des produits cosmétique il vaut mieux qu'elle soit vierge et Bio. il vaut mieux qu'elle soit vierge et Bio.)
- Item:Boule de Souris + (C'est une boule que l'on retrouve dans les anciennes souris d'ordinateur. Elle a l'avantage d'être assez lourde et petite pour en faire un projectif (à utiliser dans un cadre réglementé))
- Item:Reveil à pince crocro + (Ce genre de petite montre/réveil se trouve … Ce genre de petite montre/réveil se trouvent assez facilement. Il suffit ensuite de l'ouvrir, de repérer quelle borne est positive et laquelle est négative et d'y souder des câbles de pinces crocos. == Utilisations dans la vie quotidienne == On peut tout à fait le relier à une pile, le mettre à l'heure et le mettre en réveil ou simplement en horloge... == [[http://www.wikidebrouillard.org/index.php?title=R%C3%A9veil_%C3%A0_pinces_croco&action=edit§ion=6 modifier]] Plus d'informations sur Réveil à pinces croco == Attention si la soudure est réalisée par un enfant.ttention si la soudure est réalisée par un enfant.)
- Item:NFC RFID Controller Shield pour Arduino + (Ce shield est basé sur le circuit PN532, u … Ce shield est basé sur le circuit PN532, un contrôleur idéal pour lire et écrire dans les TAG RFID NFC à 13,56 MHz, il esti utilisé en téléphonie mobile pour communiquer avce trop téléphones pour les paiement mobiles, et il peut emuler un TAG RFID. Bien que ces fonctionnalités sont possible avec le PN532, la librairie Arduino actuelle ne permet de lire et écrire dans des TAG NFC RFID. Le protocole NFC ( Near Field Communication) permet à deux périphériques de dialoguer lors qu'ils sont proches. Un sorte de bluetooth, mais sans authentification. Il s'agit d'une extension du RFID, donc tout ce que vous pouvez faire en RFID, vous pouvez le faire en NFC. Le shield est compatible de la plupart des TAG, y compris des MiFare. L'antenne est intégrée dans le circuit du shield et elle a été etudié pour être parfaitementa ccordée à la réquence de 13,56 MHz dans une longueur max de 10 cm. Le PN53 dialogue en I2C ou en SPI. Par defaut, c'ets le protocole I2C qui ets utilisé avec les pins A4 et A5. La pin D2 sert d'interruption pour detecter dès une objet NFC RFID est à portée. Il possible de modifier l'affectation de cette pin ainsi que les pins utilisé pour la liaison SPI. Le shield PN532 ets vendu avec un connecteur strip 36 points et une carte MiFare 1K. === Caractéristiques === * Dimension : 2.1" (53.3mm) x 4.7" (117.7mm) and 0.425" (1.1mm) thick. Cette carte utilise le protocole I2C 7-bit à l'address 0x48 === Documentation === * Librairie Arduino : [https://github.com/adafruit/Adafruit_NFCShield_I2C Adafruit_NFCShield_I2C] * Schéma de la carte : [http://www.adafruit.com/datasheets/PN532_Breakout_Schematic_v1.0.pdf PN532_Breakout_Schematic_v1.0.pdf] * Manuel d'utilisation : [https://learn.adafruit.com/adafruit-pn532-rfid-nfc Adafruit PN532 RFID/NFC Breakout and Shield]afruit PN532 RFID/NFC Breakout and Shield])
- Item:Tuyau +
- Item:Câble Dupont + (De différentes longueurs et de différents embouts (malles ou femelles avec toutes les combinaisons possibles : M-M, M-F, F-F), ils sont utilisés pour brancher les composants électroniques entre eux (Arduino, breadboards, ...) pour faire du prototypage.)
- Item:Pate à modeler + (Elle était autrefois faite avec de la terr … Elle était autrefois faite avec de la terre glaise et était utilisée par les sculpteurs . == [[http://www.wikidebrouillard.org/index.php?title=P%C3%A2te_%C3%A0_modeler&action=edit§ion=3 modifier]] Composition chimique == Il est possible de fabriquer sa pâte à modeler maison avec de l'huile, de la maïzena, de la farine et de l'alun de potassium (attention celui-ci est toxique en cas d'ingestion). Sur ce site vous trouvez pour comparer [http://www.cfaitmaison.com/divers/modeler.html plusieurs recettes] (Site "C fait maison") car souvent les pâtes à modeler sont plus molles que les pâtes du commerce. Il est également possible de fabriquer une [http://www.tiboo.com/tibooparc/bricolages/patamod.htm pâte à modeler non toxique] sans alun de potassium. Certaines pâtes à modeler du commerce flottent mieux que d'autres (avec la même forme), qu'y a t'il de plus ou de moins dans ces pâtes ? comparer les composition chimique de différentes pâtes. == [[http://www.wikidebrouillard.org/index.php?title=P%C3%A2te_%C3%A0_modeler&action=edit§ion=4 modifier]] Propriétés == * maléable * adhérente == [[http://www.wikidebrouillard.org/index.php?title=P%C3%A2te_%C3%A0_modeler&action=edit§ion=5 modifier]] Expériences qui utilisent ce matériel == Indiquer le '''concept scientifique''' associé à chacune des expériences. === [[http://www.wikidebrouillard.org/index.php?title=P%C3%A2te_%C3%A0_modeler&action=edit§ion=6 modifier]] Sur le Wikidébrouillard === * [http://www.wikidebrouillard.org/index.php?title=Ascenseur_pelliculaire Ascenseur pelliculaire] * [http://www.wikidebrouillard.org/index.php?title=%C3%89quilibriste Équilibriste] => gravité, équilibre * [http://www.wikidebrouillard.org/index.php?title=Sismographe Sismographe] => réalisation technique * [http://www.wikidebrouillard.org/index.php?title=Poumons_en_bocal Poumons en bocal] => santé, corps humain === [[http://www.wikidebrouillard.org/index.php?title=P%C3%A2te_%C3%A0_modeler&action=edit§ion=7 modifier]] Autres expériences utilisant ce matériel === * [http://cyberfolio.recitmst.qc.ca/portfolio/planif/imprimervisiteur.php?situ=530 Comment faire flotter de la pâte à modeler] == [[http://www.wikidebrouillard.org/index.php?title=P%C3%A2te_%C3%A0_modeler&action=edit§ion=8 modifier]] Où la trouver facilement ? == * dans les grands magasins * dans les magasins de jouets * dans les magasins de loisirs créatifs * la fabriquer == [[http://www.wikidebrouillard.org/index.php?title=P%C3%A2te_%C3%A0_modeler&action=edit§ion=9 modifier]] Utilisations dans la vie quotidienne == * modeler * sculpter * films d'animationhp?title=P%C3%A2te_%C3%A0_modeler&action=edit§ion=9 modifier]] Utilisations dans la vie quotidienne == * modeler * sculpter * films d'animation)
- Item:Pomme de Terre + (En 2008''' c'est l'[http://www.unesco.ch/a … En 2008''' c'est l'[http://www.unesco.ch/actual-f/internationales_jahr_2008_1_f_frame.htm année internationale de la pomme de terre]''' La pomme de terre est produit par l'espèce '''Solanum tuberosum''', appartenant à la famille des Solanacées. La pomme de terre était cultivée par les habitants des Andes péruviennes près de '''1000 ans avant J.-C.''', elle est appelée papa en quechua. '''Arrivée de la pomme de terre en Europe :''' "La pomme de terre est cultivée par des moines de Séville en 1573 pour nourrir des personnes malades. En deux siècles, la pomme de terre va conquérir l'Europe. Tandis qu'en Italie, Allemagne, Pologne et Russie on mangeait déjà des pommes de terre, en France elle ne fut utilisée que pour nourrir le bétail pendant plus de deux siècles... Concernant la France, en 1757 elle fut cultivée en Bretagne, alors en période de disette, dans la région de Rennes par Louis René de Caradeuc de La Chalotais, bientôt suivi dans le Léon par Monseigneur de la Marche, surnommé « l'évêque des patates » (eskob ar patatez). Mais c'est surtout Antoine Parmentier, de retour d'un séjour en captivité en Prusse, qui fait la promotion de la pomme de terre comme aliment humain et réussit à développer son usage dans toutes les couches de la société française." [source Wikipédia] == [[http://www.wikidebrouillard.org/index.php?title=Pomme_de_terre&action=edit§ion=4 modifier]] Composition chimique == Une pomme de terre contient : * 70 à 80 % d'eau * des hydrates de carbone : glucides notamment de l'amidon (=fécule) * des protéines * des minéraux en particulier du potassium * des vitamines : C... == [[http://www.wikidebrouillard.org/index.php?title=Pomme_de_terre&action=edit§ion=5 modifier]] Propriétés == La pomme de terre contient entre autres de l''''amidon''', un polysaccharide qui est exploité pour ses propriétés d'épaississant et de gélifiant. Sa '''fécule''', matière amylacée est utilisée pour de multiples utilisations industrielles (rubrique applications quotidiennes). Les propriétés de la fécule avec la Maïzena (=fécule de maïs) sont montrées dans cette expérience : [http://www.wikidebrouillard.org/index.php?title=Ma%C3%AFzena_:_fluide_ou_solide_%3F Maïzena : fluide ou solide ?] == [[http://www.wikidebrouillard.org/index.php?title=Pomme_de_terre&action=edit§ion=6 modifier]] Expériences qui utilisent ce matériel == Indiquer le '''concept scientifique''' associé à chacune des expériences. === [[http://www.wikidebrouillard.org/index.php?title=Pomme_de_terre&action=edit§ion=7 modifier]] Sur le Wikidébrouillard === * [http://www.wikidebrouillard.org/index.php?title=Comment_traverser_une_pomme_de_terre_avec_une_paille_%3F Comment traverser une pomme de terre avec une paille ?] * [http://www.wikidebrouillard.org/index.php?title=La_pile_avec_une_pomme_de_terre La pile avec une pomme de terre] * [http://www.wikidebrouillard.org/index.php?title=Le_lance_patate_explosif Le lance patate explosif] === [[http://www.wikidebrouillard.org/index.php?title=Pomme_de_terre&action=edit§ion=8 modifier]] Autres expériences utilisant ce matériel === Pourquoi ne pas [http://www.wikidebrouillard.org/index.php?title=Aide:Aide#Comment_cr.C3.A9er_une_nouvelle_page_.3F réaliser la fiche expérience] pour le Wikidébrouillard ! * [http://www.dailymotion.com/relevance/search/pomme+de+terre/video/x1dknn_japjaponaiseplucherpommedeterre_ads Comment éplucher une pomme de terre] : en vidéo, trop fort ces japonnais ! * [http://users.skynet.be/chr_loockx_sciences/exp_osmose_4.htm osmose de la pomme de terre] * [http://crdp.ac-paris.fr/d_arts-culture/res/fiche3.pdf test à la teinture d'iode]: mise en évidence de l'amidon dans la pomme de terre * Extraction de l'ADN de la pomme de terre == [[http://www.wikidebrouillard.org/index.php?title=Pomme_de_terre&action=edit§ion=9 modifier]] Où la trouver facilement ? == * Dans son jardin * Sur les marchés * Supermarchés == [[http://www.wikidebrouillard.org/index.php?title=Pomme_de_terre&action=edit§ion=10 modifier]] Utilisations dans la vie quotidienne == * Alimentation : il s'agit d'un des légumes les plus consommés dans les Amériques et en Europe. Consommée nature, en frites, purée... * Industrie : sa fécule a de multiples utilisations industrielles. "elle entre dans la composition de certains médicaments, dans celle du rouge à lèvres ou des couches pour bébés, dans la papeterie, le textile, le contreplaqué. Traité par eau chaude, l'amidon est appelé empois et entre dans la confection du caoutchouc ou dans le glaçage du papier photo. On signalera pour mémoire l'empesage des cols ou poignets de chemises, aujourd'hui disparu. De même, l'amidon est moins utilisé qu'autrefois dans la fabrication de colles." [Source Wikipédia]e même, l'amidon est moins utilisé qu'autrefois dans la fabrication de colles." [Source Wikipédia])
- Item:Accordeur + (En musique, un accordeur est un appareil é … En musique, un accordeur est un appareil électronique ou acoustique (frappé ou soufflé) indiquant par un signal visuel (cadran à aiguilles, LEDs) la différence en cents entre le son entendu et la référence absolue sélectionnée, correspondant à une note de musique donnée. Certains modèles peuvent aussi, ou seulement, générer les fréquences souhaitées, afin de servir de référence pour l'accordage. L'accordeur peut également être une pédale d'effet, intégré au sein d'un multieffet, au format rack ou encore un plugin sur ordinateur. Des applications pour smartphones permettent de transformer son téléphone mobile en accordeur de très grande qualité. Les accordeurs à pince se clipsent directement sur l'instrument et utilisent les vibrations des cordes pour indiquer la fréquence, permettant de s'accorder en silence ou sur une scène bruyante. Les hautboïstes, qui donnent traditionnellement le ''la'' pour l'accord de l'orchestre, utilisent fréquemment un accordeur pour ce faire, afin de préciser absolument la hauteur du diapason communiqué.olument la hauteur du diapason communiqué.)
- Item:Gaze + (En textile la gaze est un tissu qui se car … En textile la gaze est un tissu qui se caractérise par un tissage de fils écartés. Elle s'emploie principalement dans l'habillement (voiles, écharpes, cols, robes) et l'ameublement (rideaux, moustiquaires). L'usage de la gaze est également lié à l'apparition du tutu au XIXe siècle. À l'époque, certaines danseuses achètent de la gaze pour réaliser elles-mêmes leurs tutus. La gaze s'utilise jusqu'à la Seconde Guerre mondiale pour la fabrication du tutu, mais plus actuellement. Le terme de gaze s'est étendu à d'autres matériaux et usages : * une bande de gaze est un tissu lâche de fibres de coton hydrophile utilisés pour nettoyer une plaie, faire des compresses et des pansements. * divers métaux permettent de fabriquer des gazes utilisées comme pré-filtres à air ou à eau pour des appareils ou l'industrie. * utilisation en archéologie comme pour les relevés de coupes stratigraphiques (ajouté à de la colle), les prélèvements, ... Source illustration et texte : https://fr.wikipedia.org/wiki/Gaze Source illustration et texte : https://fr.wikipedia.org/wiki/Gaze)
- Item:Makey makey + (Il suffit de relier un objet à une des bro … Il suffit de relier un objet à une des broches pour que cet objet intègre le circuit s'il conduit le courant. Une fois l'objet relié, le corps humain conduisant le courant, on peut relier la masse du makey makey a une pince et tout en tenant la pince, touché l'objet afin de fermer le circuit. Cela aura pour effet d'activer la touche de laquelle la broche est connectée. Pensez à relier le makey makey à l'ordinateur grâce au câble. == Expériences scientifiques avec Makey Makey == * Il est possible de [http://www.wikidebrouillard.org/index.php?title=Cr%C3%A9e_ton_MakeyMakey_(ou_le_clavier_%C3%A9clat%C3%A9) créer soi-même un makey makey] avec Wikidébrouillard ! * Etudier[http://www.wikidebrouillard.org/index.php?title=La_conductivit%C3%A9_avec_makey_makey la conductivité avec le makey makey]akey la conductivité avec le makey makey])
- Item:Carte arduino micro-controleur + (Il était destiné à l'origine principalemen … Il était destiné à l'origine principalement mais pas exclusivement à la programmation multimédia interactive, en vue de spectacles ou d'animations artistiques. L’histoire retiendra que c’est dans un bar d’une petite ville du nord de l’Italie qu’est né le projet Arduino. C’est en l’honneur de ce bar où Massimo Banzi a pour habitude d’étancher sa soif que fut nommé le projet électronique Arduino (dont il est le cofondateur). Arduino est une carte microcontrôleur à bas prix qui permet — même aux novices — de faire des choses époustouflantes. Sortie en 2005 comme un modeste outil pour les étudiants de Banzi à l’Interaction Design Institute Ivrea (IDII), Arduino a initié une révolution DIY dans l’électronique à l’échelle mondiale. Vous pouvez acheter une carte Arduino pour une vingtaine d'euros ou vous construire la vôtre à partir de rien : tous les schémas électroniques et le code source sont disponibles gratuitement sous des licences libres. Le résultat est qu’Arduino est devenu le projet le plus influent de son époque dans le monde du matériel libre. [http://www.framablog.org/index.php/post/2011/12/10/arduino-histoire Lire tout l'article source en CC-By-Sa sur Framablog] == Comment l'utiliser ? == * Il faut télécharger le logiciel de programmation [http://www.arduino.cc/fr/ sur le site Arduino]. * L'installer sur son ordinateur (le logiciel est compatible Linux, Mac OSX et Windows). Et vous pouvez commencer par tester, dans les exemples de programmes, le programme "Blink" qui fera clignoter la LED de l'Arduino qui est branchée sur la pin 13. Vous pouvez aussi tester le tutoriel [http://www.wikidebrouillard.org/index.php?title=Blinker_une_LED Blinker une LED]. On peut donner des "pouvoirs" supplémentaires à l'arduino grâce à des circuits imprimés qu'on branche dessus : les shields. Il en existe de différentes sorte : * ethernet : pour connecter votre arduino au réseau via un câble RJ45, * Bluetooth * Zigbee : pour communiquer par ondes radio * Wifi * Pilotage de moteurs * Ecran LCD * shield Breadboard : pour faire les montages directement sur l'arduino ! * ... == Qu'est-ce que c'est exactement ? == === Un micro-contrôleur === C'est un circuit intégré qui traite les informations qu'il reçoit et déclenche des actions suivant le programme qu'il a reçu. === Interface USB/série === L'Arduino se connecte à un ordinateur par un câble USB. C'est par ce câble qu'on va installer le programme. C'est également par ce câble que l'Arduino peut renvoyer des informations à l'ordinateur. Lorsque l'Arduino est connecté en USB, c'est l'USB qui assure l'alimentation électrique de l'Arduino. Pour l'ordinateur, la carte Arduino est comme un simple périphérique (il faut donc installer les pilotes !). === Des entrées et des sorties === Il y a 20 entrées/sorties sur l'Arduino. * 6 analogiques, numérotées de A0 à A5. * 14 numériques, numérotées de 0 à 13. 6 de ces entrées/sorties peuvent assurer une sortie PWM (Pulse Width Modulation - Modulation de Largeur d'Impulsion, une astuce pour modifier le courant de sortie). Les 6 PMW sont les numéros 3, 5, 6, 9, 10, 11. ==== Les entrées analogiques ==== Elles peuvent recevoir une tension variable (entre 0 et 5 volts) en provenance de capteurs analogiques (résistance variable par exemple). ==== Les entrées/sorties numériques ==== Elles reçoivent ou envoient des signaux numériques (donc 0 ou 1). ces signaux se traduisent par 0V ou 5V. Le fonctionnement (entrée ou sortie) est fixé dans le programme (INPUT, OUTPUT). ===== Entrées numériques : attention au smog électromagnétique ===== Lorsque qu'une entrée numérique n'est connectée à rien, elle reçoit un signal dû à l'électricité statique ou l'ambiance électromagnétique. On parle alors de potentiel flottant. On peut fixer le potentiel grâce à un système de résistance dite de pull-up (tension max, soit 5V) ou pull down (tension min ou 0V). On utilise une résistance de 10kOhms connectée de l'entrée au +5V (pull-up), ou alors à la masse (GND, 0V, le pull-down). ===== Sorties numériques ===== Leur puissance est limitée à 40 mA par broche pour un total de 200mA consommé. Si on a besoin de consommer plus de puissance électrique, alors il faudra utiliser un circuit supplémentaire (une autre carte, pilotée par l'Arduino qui servira à fournir le courant nécessaire. ça peut être un shield). Dans ce cas on parle de circuit de commande (l'arduino), et de circuit de puissance (le shield). Il est important que les masses (GND) soient connectées. La puce ATmega n'est pas capable de sortir des tensions variables mais grâce au signal PMW on peut fournir une tension variable artificielle. Le signal PMW consiste à faire "clignoter" le courant : * Quand le courant sort à 5V en continue, la broche sort du 5V. * Imaginez maintenant que la broche délivre très rapidement un clignotement entre 0V et 5V (la broche délivre soit 0V, soit 5V). Si elle délivre pour moitié du temps du 5V, elle imitera du 2,5V. Si elle donne 5V 20% du temps ce sera 1V, etc.... == Les limites de l'arduino == === Avec quoi alimenter mon arduino ? === * Par le port USB : 5V * Par une alimentation externe : ** Une fiche jack 2.1 mm mâle. ** Une alimentation DC stabilisée entre 7~12 volts DC. ** Le centre positif + <-----o )------> - l'arduino peut accepter entre 6, minimum et 20 Volts grand maximum. Intensité maximale disponible par broche entrée/sortie 5V : 40 mA (avec un total de 200 mA) Intensité maximale disponible pour la sortie 3,3V : 50 mA Intensité maximale disponible pour la sortie 5V : 500 mA en cas d'alimentation par le port USB seul, sinon en fonction de l'alimentation utilisée. * Mémoire Programme Flash : 32 KB (ATmega328) dont 0.5 KB sont utilisés par le bootloader * Mémoire SRAM (mémoire volatile) : 2 KB (ATmega328) * Mémoire EEPROM (mémoire non volatile) : 1 KB (ATmega328) * Vitesse d'horloge : 16 MHz [http://www.mon-club-elec.fr/pmwiki_reference_arduino/pmwiki.php?n=Main.MaterielUno Source : Mon club Elec licence CC-By-Sa]rielUno Source : Mon club Elec licence CC-By-Sa])
- Item:Eau + (L''''eau''' est une [https://fr.wikipedia … L''''eau''' est une [https://fr.wikipedia.org/wiki/Substance_chimique substance chimique] constituée de [https://fr.wikipedia.org/wiki/Mol%C3%A9cule molécules] [https://fr.wikipedia.org/wiki/Hydrog%C3%A8ne H]2[https://fr.wikipedia.org/wiki/Oxyg%C3%A8ne O]. Ce [https://fr.wikipedia.org/wiki/Compos%C3%A9_chimique composé] est très [https://fr.wikipedia.org/wiki/Stabilit%C3%A9_chimique stable] et néanmoins très [https://fr.wikipedia.org/wiki/R%C3%A9actif_(chimie) réactif]. Dans de nombreux contextes le terme '''eau''' est employé au [https://fr.wikipedia.org/wiki/Sens_(litt%C3%A9rature)#sens_strict_/_sens_large sens restreint] d'eau à l'[https://fr.wikipedia.org/wiki/Liquide état liquide], et il est également employé pour désigner une [https://fr.wikipedia.org/wiki/Solution_aqueuse solution aqueuse] diluée ([https://fr.wikipedia.org/wiki/Eau_douce eau douce], [https://fr.wikipedia.org/wiki/Eau_potable eau potable], [https://fr.wikipedia.org/wiki/Eau_de_mer eau de mer], [https://fr.wikipedia.org/wiki/Eau_de_chaux eau de chaux], etc.). L'eau liquide est un excellent [https://fr.wikipedia.org/wiki/Solvant solvant]. L'eau est [https://fr.wikipedia.org/wiki/Ubiquit%C3%A9 ubiquitaire] sur [https://fr.wikipedia.org/wiki/Terre Terre] et dans l'[https://fr.wikipedia.org/wiki/Atmosph%C3%A8re_terrestre atmosphère], sous ses trois [https://fr.wikipedia.org/wiki/%C3%89tat_de_la_mati%C3%A8re états], [https://fr.wikipedia.org/wiki/%C3%89tat_solide solide] ([https://fr.wikipedia.org/wiki/Glace glace]), liquide et [https://fr.wikipedia.org/wiki/Gaz gazeux] ([https://fr.wikipedia.org/wiki/Vapeur_d%27eau vapeur d'eau]). L'eau extraterrestre est également abondante, sous forme de vapeur d'eau dans l'[https://fr.wikipedia.org/wiki/Espace_(cosmologie) espace] et sous forme condensée (solide[https://fr.wikipedia.org/wiki/Eau#cite_note-11 b] ou liquide) à la surface, près de la surface ou à l'intérieur d'un grand nombre d'[https://fr.wikipedia.org/wiki/Objet_c%C3%A9leste objets célestes]. L'eau est un constituant biologique important, et l'eau liquide est essentielle pour tous les [https://fr.wikipedia.org/wiki/Organisme_(physiologie) organismes vivants] connus. Compte tenu de son caractère vital, de son importance dans l'[https://fr.wikipedia.org/wiki/%C3%89conomie_(activit%C3%A9_humaine) économie] et de son [https://fr.wikipedia.org/wiki/L%27eau_dans_le_monde#Une_ressource_inégalement_répartie inégale répartition sur Terre], l'eau est une ressource naturelle dont la [https://fr.wikipedia.org/wiki/Gestion_de_l%27eau gestion] est l'objet de forts enjeux [https://fr.wikipedia.org/wiki/G%C3%A9opolitique géopolitiques]. forts enjeux [https://fr.wikipedia.org/wiki/G%C3%A9opolitique géopolitiques].)
- Item:Polystyrène + (L'application connue du grand public est l … L'application connue du grand public est le polystyrène expansé, souvent nommé [https://fr.wikipedia.org/wiki/Mousse_(mati%C3%A8re) mousse] polystyrène et très couramment utilisé en emballage. C'est une sorte de [https://fr.wikipedia.org/wiki/Mat%C3%A9riau_composite matériau composite] particulier, une [https://fr.wikipedia.org/wiki/Matrice_(constituant) matrice] plastique rigide, emprisonnant de toutes petites bulles de gaz en grande quantité. Mais ce matériau n'est qu'un des aspects de ce plastique ; on le trouve aussi souvent non-expansé, dense, rigide, transparent et peu épais, mais aussi d'autres formes d'expansé ou mélangé avec d'autres plastiques et additifs. Ses formes courantes sont : * la plus commune transparente est dite « cristal », sigle PS, l'([https://fr.wikipedia.org/wiki/Homopolym%C3%A8re homopolymère]) précité ; * l'expansé, la plus connue, à cellules fermées, de sigles PSE (EPS pour ''Expanded polystyrene'') ou PS-E selon la même norme (densité très faible, rigide, blanc, bon amortisseur de choc, économique) (appelé « frigolite » en Belgique, « [https://fr.wikipedia.org/wiki/Sagex Sagex] » en Suisse et « Styromousse » au Canada) ; * l'[https://fr.wikipedia.org/wiki/Extrusion_d%27un_plastique extrudée] à cellules fermées, sigle PSX (ou XPS = eXtruded PolyStyrene en anglais). C'est un matériau commercialisé en plaque de faible épaisseur (quelques millimètres), facile à couper, à percer, thermoformable ; sa forme est translucide, blanc-laiteux (surnommé parfois opaline), dans la gamme Styroglass; * le [https://fr.wikipedia.org/wiki/Polystyr%C3%A8ne_choc « choc »], de sigles SB, HIPS (HI pour ''High-impact'' en anglais) ou PS-HI selon la norme EN ISO 1043-1 ; Le polystyrène de base, appelé PS « cristal » pour son aspect transparent, est une matière dure et cassante, pouvant être colorée. Ses propriétés mécaniques et thermiques peuvent être modifiées par l'ajout de [https://fr.wikipedia.org/wiki/Plastifiant plastifiants] ou de [https://fr.wikipedia.org/wiki/Buta-1,3-di%C3%A8ne butadiène] (monomère du [https://fr.wikipedia.org/wiki/Polybutadi%C3%A8ne polybutadiène]) pour en faire un polystyrène dit « choc ». C'est un matériau très facile à transformer, par [https://fr.wikipedia.org/wiki/Injection_d%27un_plastique injection] ou extrusion par exemple. D'une manière pratique, on le reconnaît à son côté cassant avec un blanchissement sur les zones de contraintes. La façon la plus simple de reconnaître un plastique est de le brûler pour observer la flamme, la fumée, et en sentir l'odeur ; ce qu'il vaut mieux éviter étant donné la toxicité des gaz lors de la [https://fr.wikipedia.org/wiki/Combustion combustion] de certains plastiques. Le polystyrène est facilement reconnaissable à sa fumée noire et à son odeur caractéristique. On peut également le distinguer au bruit métallique qu'il produit en subissant un choc, par exemple en tombant sur une surface dure. Le polystyrène, outre son côté cassant, souffre aussi d'une faible résistance chimique et d'une faible résistance à la fissuration sous contrainte (ESCR). L'acétone le dissout très facilement, les corps gras le fragilisent rapidement. Le polystyrène est le plus commun de la famille des ''[https://fr.wikipedia.org/wiki/Polym%C3%A8re_styr%C3%A9nique polymères styréniques]''. Cette famille contient les différents [https://fr.wikipedia.org/wiki/Copolym%C3%A8re copolymères] du styrène : [https://fr.wikipedia.org/wiki/Styr%C3%A8ne-butadi%C3%A8ne styrène-butadiène] (SBR), [https://fr.wikipedia.org/wiki/Styr%C3%A8ne-acrylonitrile styrène-acrylonitrile] (SAN), [https://fr.wikipedia.org/wiki/Acrylonitrile_butadi%C3%A8ne_styr%C3%A8ne acrylonitrile butadiène styrène] (ABS), [https://fr.wikipedia.org/wiki/Acrylonitrile_styr%C3%A8ne_acrylate acrylonitrile styrène acrylate] (ASA), etc.br class="abbr" title="et cetera">etc.</abbr>)
- Item:Imprimante 3D + (L'impression 3D permet de réaliser un obje … L'impression 3D permet de réaliser un objet réel : un concepteur dessine l'objet 3D grâce à un outil de conception assistée par ordinateur (CAO). Le fichier 3D obtenu est traité par un logiciel spécifique qui organise le découpage en tranches des différentes couches nécessaires à la réalisation de la pièce. Le découpage est envoyé à l'imprimante 3D qui dépose ou solidifie la matière couche par couche jusqu'à obtenir la pièce finale. Le principe reste proche de celui d'une imprimante 2D classique à cette grande différence près : c'est l'empilement des couches qui crée le volume.
Il n’existe pas une seule et unique façon d’imprimer en 3D. En effet, en pensant à l’impression 3D, beaucoup de personnes pensent encore à l’impression FDM ( dépot de matiere). Il existe actuellement plusieurs techniques pour créer des pièces de façon additive. Le choix du matériau et de la technologie sera déterminé en fonction de la nature de votre projet. De quelles propriétés avez-vous besoin ? De quelle résistance ?
Voici quelques exemples , utiliser en FABLAB .
*Dépôt de fil ou FDM: Cette méthode d’impression 3D est bien connue des amateurs, mais aussi du milieu de l’éducation. Le matériau plastique est présenté sous forme de filament. Les imprimantes 3D FDM utilisent une ou deux têtes d’impression pour le dépôt de matière fondue. Le filament est fondu et extrudé à travers la buse d’impression, pour créer l’objet désiré, couche par couche. L’impression FDM est principalement connue pour être une technique d’impression 3D plastique, mais il est maintenant possible de l’utiliser afin d’imprimer du métal par exemple. *Stéréolithographie, ou SLA: La stéréolithographie est la première technique d’impression 3D créée. La technique SLA est un procédé d’impression 3D qui utilise un réservoir rempli de résine liquide, solidifiés à l’aide d’une lumière UV. Un objet peut être imprimé en 3D en étant déplacé de bas en haut (ou inversement) afin de créer de l’espace pour les polymères non solidifiés dans le fond du réservoir. *Le Frittage Sélectif par Laser, ou SLS : Cette technique d’impression 3D créé des objets en frittant la poudre à l’intérieur de l’imprimante, grâce à un laser. Durant de procédé fonctionnant couche par couche, le lit de poudre est préchauffé et un laser vient fritter la poudre en fonction du fichier 3D pour créer un objet solide.
du fichier 3D pour créer un objet solide. <br/>) - Item:Bille + (L'origine du jeu de billes reste inconnue. … L'origine du jeu de billes reste inconnue. Des billes d'argile ont été découvertes dans des tombes égyptiennes datant du début du [https://fr.wikipedia.org/wiki/IIIe_mill%C3%A9naire IIIe millénaire] mais il est difficile de faire un lien avec le jeu[https://fr.wikipedia.org/wiki/Jeu_de_bille#cite_note-2 2]. La première apparition connue du jeu semble remonter à la [https://fr.wikipedia.org/wiki/Gr%C3%A8ce_antique Grèce antique] où l'on pratiquait la τροππα / ''troppa'' ; le but du jeu était de lancer un maximum de petits objets ronds dans un trou. Pareillement, les Romains jouaient aux noix (''nucibus ludere'') ou à l'''orca'', jeu où il fallait lancer des [https://fr.wikipedia.org/wiki/Noix noix] ou des [https://fr.wikipedia.org/wiki/Noisette noisettes] dans un vase ou un cornet à dés (''orca'' en latin). Entre le [https://fr.wikipedia.org/wiki/Moyen_%C3%82ge Moyen Âge] et la [https://fr.wikipedia.org/wiki/Renaissance_(p%C3%A9riode_historique) Renaissance], la bille, qui était jusqu'alors un objet écologique, devient un objet [https://fr.wikipedia.org/wiki/Artisanat artisanal] en verre. Certains maîtres [https://fr.wikipedia.org/wiki/Artisan_verrier verriers] [https://fr.wikipedia.org/wiki/Venise vénitiens] auraient en effet produit des billes au [https://fr.wikipedia.org/wiki/XIVe_si%C3%A8cle XIVe siècle][https://fr.wikipedia.org/wiki/Jeu_de_bille#cite_note-La_bille_23-3 3]. En [https://fr.wikipedia.org/wiki/Bois bois] ou [https://fr.wikipedia.org/wiki/M%C3%A9tal métal], de forme grossièrement sphérique, elles sont alors appelées gobilles. Toutefois, malgré cette évolution progressive de la bille, ce n'est qu'au [https://fr.wikipedia.org/wiki/XVe_si%C3%A8cle XVe siècle] que les jeux s'organisent et que les règles se mettent en place, de façon orale. Le [https://fr.wikipedia.org/wiki/XVIIIe_si%C3%A8cle XVIIIe siècle], siècle des Lumières et des Encyclopédistes, voit se développer un intérêt croissant pour les jeux et les jouets, ainsi qu'une nouvelle conception de l'éducation avec [https://fr.wikipedia.org/wiki/Jean-Jacques_Rousseau Rousseau]. On assiste également aux balbutiements de la [https://fr.wikipedia.org/wiki/R%C3%A9volution_industrielle Révolution industrielle]. Consécutivement à ces mutations, les billes s'arrondissent parfaitement. Les matériaux de fabrication, quant à eux, se multiplient ; tout d'abord en terre, la bille peut également être de verre, de pierre, d'agate, de marbre, etc.ent. Les matériaux de fabrication, quant à eux, se multiplient ; tout d'abord en terre, la bille peut également être de verre, de pierre, d'agate, de marbre, etc.)
- Item:Oeuf + (La coquille de l'œuf est principalement co … La coquille de l'œuf est principalement composé de Carbonate de Calcium (calcaire). Le jaune est composé de lipides, et le blanc d'eau et de protéines (notamment l'ovalbumine). ==Propriétés== La composition chimique des différentes parties de l'oeuf détermine ses propriétés ! logique non ? ==Où le trouver facilement ?== *Au supermarché *Dans la cuisine *Dans le poulailler *Pour les expériences essayer de trouver des oeufs périmés *Le substituer si on en n'a pas sous la main, on peut quelquefois substituer l'oeuf de l'expérience par un ballon de baudruche avec de l'eau (exemple sur cette expérience : comment faire entrer un oeuf dans une bouteille ?) ==Utilisations dans la vie quotidienne== L'oeuf de poule est surtout utilisé en cuisine sous diverses formes (oeuf sur le plat, omelette, ingrédient pour la pâte à gâteau,..), mais on peut aussi en trouver dans certains shampooings par exemple.ver dans certains shampooings par exemple.)
- Item:Maquette de bassin versant + (La fabrication d'une maquette de bassin ve … La fabrication d'une maquette de bassin versant n'est pas très difficile et permet de réaliser de nombreuses observations et expériences pour comprendre le cycle de l'eau et les enjeux liés à l'eau. Vous avez surtout besoin de polystyrène extrudé, de peinture, de colle, de papier de verre, d'un peu de patience et de créativité. L'important est de faire apparaitre des reliefs et de creuser un ou plusieurs cours d'eau circulant d'amont en aval jusqu'à la mer. Voir la fiche Wikidebrouillard "[[Fabrication d'une maquette de bassin de versant]]".ion d'une maquette de bassin de versant]]".)
- Item:POCL Light'EM + (La fabrication de l'objet s'inscrit dans u … La fabrication de l'objet s'inscrit dans une volonté de dévoiler le fonctionnement afin de faciliter la compréhension et la maintenabilité de l'appareil. En effet, tous les composants sont visibles, toutes les soudures et câbles également.
==Fabrication==
Il possède 4 couches faites en carton bois 3mm. Ces étages ont été découpé à la découpe laser d'après un fichier de découpe Illustrator.
Les tiges sont en bois de 6mm de diamètres et les étages sont assemblés par imbrication.
Enfin, un cercle en calque est installé au dessus des lumières pour les diffuser de manière plus douce et uniforme.
'''Fabrication détaillée : '''
Structure :
A l’aide de la découpeuse laser, réaliser les différentes pièces pour l’assemblage. (voir fichier ci-dessous).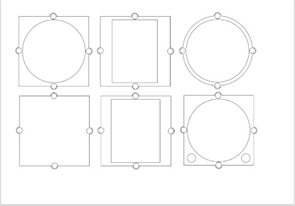
Dimensions cercles : Cercles intérieurs 9cm de diamètre ; cercle extérieur 10cm de diamètre.
Dimensions carrés : 9 cm de coté.
Dimensions rectangle : 9cm de longueurs et 7cm de largeurs
Découper également à l’aide compas-cutter 6 cercles de claques transparents de diamètre différents :
Un de 2cm, 4cm, 6cm, 8cm, 10cm, 12cm.
Commencer l’assemblage de la structure :
Notre produit est constitué de 4 étages qui sont respectivement : un 1er étage formé de 2 rectangles avec un trou carré au milieu où l’on retrouve la carte mère du produit ; un 2e étage toujours formé de 2 rectangles avec un trou circulaire ou l’on retrouve des LED pour indiquer l’exposition ; un 3e étage où l’on retrouve un papier calque transparent.
L’assemblage de ces étages se fait grâce à des bâtons de 10cm de hauteur et de 0.8cm de diamètres à placer dans les trous fais au préalable grâce à la découpeuse laser.
À l’aide d’une carte Arduino, nous effectuons les branchements suivants :
# Nous commençons par connecter les boutons poussoirs : chaque bouton dispose d’un câble rouge pour l’entrée et d’un câble noir pour la mise à la terre.
# Les deux câbles noirs sont reliés à la masse (GND) de la carte Arduino, tandis que les câbles rouges sont connectés respectivement aux broches D4 et D18.
# Nous installons ensuite un cercle de LED, relié à la carte Arduino via un câble blanc branché sur la broche RX2.
# Enfin, nous utilisons un câble USB pour connecter l’Arduino à l’ordinateur.
Voir ci-dessous :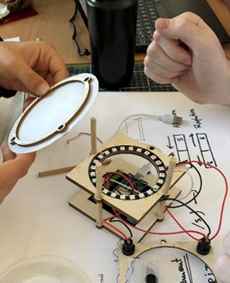
==Composants électroniques==
Pour le fonctionnement technique, le POCL est composé de plusieurs éléments électroniques :
*un microcontrôleur [https://fr.wikipedia.org/wiki/ESP32 ESP32], coeur de l'objet, qui exécute le code.
*un cercle de LEDs, connecté à l'ESP32 affichant une couleur unie en fonction des données des capteurs d'ondes électromagnétiques
*deux boutons : un pour changer de capteur (modifiant potentiellement ainsi la couleur affichée), un autre pour revenir au capteur par défaut (le capteur préféré de l'utilisateur, changeable dans le code uniquement).
Les différents composants sont installés sur les étages de notre objet de la façon suivante :
*le socle contient la carte ESP32. Il a été taillée aux dimensions du microcontrôleur de façon à ce qu'il soit calé.
*le premier étage comprend le cercle de 24 LEDs, connecté à l'ESP32 via un fil.
*le second étage contient le cercle de calque pour uniformiser la lumière
*le dernier étage possède les boutons qui permettent de changer de capteur d'ondes EM.
==Programmation==
La carte ESP32 a été flashée avec [https://micropython.org/ Micropython] grâce à cet [https://dblocadata.debrouillonet.org/~test/#flash outil] pour pouvoir développer en python.
L'ensemble du code python est consultable sur ce [https://github.com/benja330312/hackaton2025pocl repo Github] et toutes les données des capteurs sont récupérées depuis cette [https://opendata.bordeaux-metropole.fr/explore/dataset/rt_ondeelectro_p/information/ API].
Pour faire fonctionner le POCL, il lui faut un accès Internet. Pour ça, vous devez créer un point d'accès avec les caractéristiques suivantes :
*Nom d'accès : POCO X7 Pro Benjamin
*Mot de passe : benjamin1234
Cela vous permet de simuler le point d'accès afin qu'il puisse récupérer les données. Une autre façon serait d'aller modifier dans le code les informations de connexion.
Pour ça, la plateforme [https://dblocadata.debrouillonet.org/~test/BIPES/ui/?idw=78 DBlocaData] permet de pouvoir accéder aux fichiers installés sur l'ESP32 :
*Connectez le POCL avec le câble USB sur l'ordinateur
*Cliquez sur l'icône de connexion en haut à droite pour lier l'ESP32
*Une fois la carte liée, cliquez sur l'onglet "Fichiers"
*Sur cette page, cliquez sur le bouton à droite de "Fichiers sur le microcontrôleur" dans la partie gauche de l'écran
*Vous verrez alors le fichier boot.py, qui est exécuté à chaque démarrage du POCL. Vous pourrez alors modifier le code microPython qui est dessus.
*Pensez à cliquer sur le bouton "Save" pour enregistrer les changements dans le code et que ce soit appliqué sur le microcontrôleur
us.<br />*Pensez à cliquer sur le bouton "Save" pour enregistrer les changements dans le code et que ce soit appliqué sur le microcontrôleur<br /><br /><br/>) - Item:Balle de pingpong + (Le '''tennis de table''', aussi appelé « p … Le '''tennis de table''', aussi appelé « ping-pong », est un [https://fr.wikipedia.org/wiki/Sport_de_raquette sport de raquette] opposant deux ou quatre joueurs autour d'une table. Le tennis de table est une activité de [https://fr.wikipedia.org/wiki/Loisir loisir], mais c'est également un [https://fr.wikipedia.org/wiki/Sports_olympiques sport olympique] depuis [https://fr.wikipedia.org/wiki/1988_en_sport 1988]. Il existe plusieurs dénominations de ce sport à travers le monde : ''ping pang qiu'' ([https://fr.wiktionary.org/wiki/%E4%B9%92 乒][https://fr.wiktionary.org/wiki/%E4%B9%93 乓][https://fr.wiktionary.org/wiki/%E7%90%83 球], pīng pāng qiú, « balle ping-pang »), en [https://fr.wikipedia.org/wiki/R%C3%A9publique_populaire_de_Chine République populaire de Chine] et [https://fr.wikipedia.org/wiki/R%C3%A9publique_de_Chine_(Ta%C3%AFwan) République de Chine (Taïwan)], les caractères étant assez particuliers puisqu'ils représentent des raquettes face à face, ou également en Chine ''zhuo qiu'' ([https://fr.wiktionary.org/wiki/%E5%8D%93 卓][https://fr.wiktionary.org/wiki/%E7%90%83 球], zhuō qiú, « balle de table »), qui se prononce au [https://fr.wikipedia.org/wiki/Japon Japon] ''takkyū'' (卓球[https://fr.wikipedia.org/wiki/Aide:Japonais ?]). En revanche le mot ''ping-pong'' proviendrait de la [https://fr.wikipedia.org/wiki/Marque_commerciale marque commerciale] sous laquelle le jeu est produit aux États-Unis au début du XXe siècle[https://fr.wikipedia.org/wiki/Tennis_de_table#cite_note-3 3],[https://fr.wikipedia.org/wiki/Tennis_de_table#cite_note-4 4]. Ce terme est plutôt utilisé pour désigner le jeu de loisirs, alors que le terme de tennis de table est plutôt utilisé pour désigner la pratique sportive ; malgré tout, un pratiquant de ce sport, y compris en compétition, s'appelle toujours un « pongiste ». L'histoire de ce sport d'origine britannique est marquée par une série d'évolutions techniques (nature des revêtements de raquettes, introduction puis interdiction d'usage de la colle rapide) qui ont conduit à des innovations dans le style de jeu (utilisation de la « [https://fr.wikipedia.org/wiki/Prise_porte_plume prise porte plume] » par les Hongrois puis les Asiatiques) et dans les tactiques employées au plus haut niveau comme l'apparition du [https://fr.wikipedia.org/wiki/Topspin topspin] dans le courant des [https://fr.wikipedia.org/wiki/Ann%C3%A9es_1970 années 1970]. Le tennis de table moderne permet une grande variété de systèmes de jeu, avec les jeux d'attaque, de contre-initiative à la table ou à mi-distance, et les jeux de défense particulièrement spectaculaires. Le nombre de pratiquants dans le monde est estimé en 2005 à plus de 260 millions[https://fr.wikipedia.org/wiki/Tennis_de_table#cite_note-5 5], et la [https://fr.wikipedia.org/wiki/F%C3%A9d%C3%A9ration_internationale_de_tennis_de_table Fédération internationale de tennis de table] (ITTF) regroupe plus de 200 nations et 33 millions de licenciés qui se rencontrent à tous les niveaux de compétition, du tournoi de club jusqu'aux [https://fr.wikipedia.org/wiki/Championnats_du_monde_de_tennis_de_table championnats du monde] en passant par le [https://fr.wikipedia.org/wiki/ITTF_Pro_Tour Pro tour], un ensemble de tournois organisés par l'ITTF se déroulant sur tous les continents et qui concrétise une professionnalisation au plus haut niveau.nois organisés par l'ITTF se déroulant sur tous les continents et qui concrétise une professionnalisation au plus haut niveau.)
- Item:Shield Motor + (Le Motor Shield originel d'AdaFruit est ce … Le Motor Shield originel d'AdaFruit est certainement l'un des kits les plus appréciés de l'EcoSystème Arduino. AdaFruit s'est repenché sur sa création en vue de créer un kit encore meilleur... et le pari est tenu haut la main avec une Motor Shield I2C (et une librairie Arduino) qui est et reste la façon la plus simple de commander des moteurs continu et pas-à-pas depuis un Arduino. Ce shield vous permettra de rapidement mettre sur pied vos prochains projets robotiques! Cette version 2.3 du Shield Moteur permet toujours de commander jusqu'à 4 moteurs continu et 2 moteurs pas-à-pas mais contient également de nombreuses amélioration: Ce shield utilise maintenant un pilote moteur de type TB6612 MOSFET à la place des pont-H L293D. Le TB6612 supporte '''1.2A par canal et un courant de pointe de 3A'''. Ce nouveau circuit intégré réduit également la perte de tension dans le pont-H (bien moins importante), ce qui offre une tension plus importante aux bornes du moteur et donc un meilleur couple par rapport à un L293. Finalement, il intègre également des diodes anti-retour. A la place d'utiliser un registre à décalage et les broches PWM d'Arduino, '''cette carte dispose de son propre générateur PWM'''. controleur PWM gère tous les moteurs et contrôle leurs vitesses via le bus I2C. Cette carte ne nécessite seulement que deux broches (SDA et SCL) pour contrôler le tout... et puisqu'il s'agit du bus I2C, vous pouvez également connecter d'autres shields et d'autres périphériques I2C sur les mêmes broches. Du coup, cela rend ce shield compatible avec n'importe quel Arduino, tel que le Uno, Leonardo et Mega R3. (Le support Wire de l'Arduino Due est toujours en beta, mais une fois que cela fonctionnera bien, AdaFruit fera les tests de compatibilité) '''Conçu pour être empilable''': cette carte dispose de 5 broches d'adressage permettant d'empiler jusqu'a 32 shields, ce qui représente 64 moteurs pas à pas ou 128 moteurs continu! Nous n'avons aucune idée de ce qui pourrait être créer avec autant de moteurs... mais si vous réalisez un tel projet, n'hésitez pas a nous avertir, car un tel projet doit être absolument fabuleux. Beaucoup d'autres petites améliorations comme des FETs de protection de polarité sur les broches de puissance et une petite zone de prototypage. '''Le shield est entierement assemblé et testé''' chez Adafruit, vous n'aurez besoin que de soudez vos pinHeader (ou Stacking pinHeader) et les borniers. Revoyons les spécifications encore une fois: * '''2 connexions pour des servo-moteurs 'hobby' de 5 volts''' connectés directement sur le timer Arduino haute résolution dédicacé - pas de tremblement! * 4 pont-H: le chipset TB6612 fournit jusqu'à '''1.2A par pont''' (avec 3A en pointe) avec un protection thermique (arrêt d'urgence), diode de protection anti-retour (en roue libre) intégrée. Capable de faire fonctionner des moteurs continu de 4.5V à 13.5V. * '''Jusqu'à 4 moteurs continus (bidirectionnel)''' avec une sélection de vitesse individuel sur 8-bit (donc avec une résolution d'envrion 0.5%) * '''Jusqu'à 2 moteurs pas-à-pas''' (unipolaire ou bipolaire) avec simple bobine, double bobine, interleave ou micro-stepping. * Les moteurs sont automatiquement désactivés à la mise sous tension. * Grands borniers de connexion qui permettent de facilement brancher des fils de 0.13mm² à 0.82mm² (18-26AWG) ainsi que l'alimentation. * Le bouton reset d'Arduino est également rendu accessible sur le shield. * Bornier d'alimentation 2 bornes avec protection de polarité et cavalier pour y connecter une alimentation externe permettant ainsi de séparer l'alimentation de la logique et des moteurs. * Compatibilité testée avec Arduino UNO, Leonardo, ADK/Mega R3, Diecimila et Duemilanove. Fonctionne avec Mega/ADK R2 et précédent à l'aide de deux pontage à fils. * Téléchargez la librairie/bibliothèque Arduino, jetez un coup d'oeil dans les exemples et vous êtes prêt à commencer! == Contenu == Livré sous forme d'un shield assemblé, testé + rangée de pinHeader + cavalier avec les éléments suivants déjà soudés sur la carte: bornier de raccordement, connecteur pour les servo-moteurs et cavalier d'alimentation. Quelques opérations de soudures sont nécessaires pour assemblez les headers. Les stacking headers ne sont pas inclus, [http://mchobby.be/PrestaShop/product.php?id_product=249 mais vous pouvez vous en procurer sur notre site]. '''Arduino et les moteurs ne sont pas inclus''' mais nous disposons également de moteurs, servo et moteurs pas-à-pas dans notre gamme robotique.eurs pas-à-pas dans notre gamme robotique.)
- Item:Blé + (Le blé est une céréale cultivée un peu par … Le blé est une céréale cultivée un peu partout dans le monde. Il existe plusieurs blés comme le blé dur, utilisé pour faire la semoule et les pâtes que nous connaissons bien, le blé tendre cultivé pour faire la farine. Il existe d'autres types de blé. La plante du blé est formé d'un épi contenant les grains de blé. Ce sont ces grains qui sont utilisés. Le reste de la tige, appelé paille sert principalement comme litière pour les animaux. e blé est apparu il y a 10000 ans au Moyen-Orient Son ancêtre est l'égilope, grande céréale particulièrement rustique mais peu productive. == Composition chimique == Le grain contient 65 à 70 pour cent d'amidon ainsi qu'une substance protéique (le gluten) dispersée parmi les grains d'amidon. Le gluten est responsable de l'élasticité de la pâte malaxée ainsi que de la masticabilité des produits à base de céréales cuits au four. == Où le trouver facilement ? == On peut facilement le trouver dans les champs un peu avant la moisson au mois de juin, juillet. Il se trouve aussi dans les magasins, souvent dans le même rayon que le riz et les pâtes. == Utilisations dans la vie quotidienne == L'usage le plus courant sous sa forme directe est un usage alimentaire. On peut le cuire pour le manger directement ou alors le soufflé. Le blé soufflé est une céréale qui compose alors les bols de petits déjeuners !mpose alors les bols de petits déjeuners !)
- Item:Permanganate de potassium + (Le permanganate de potassium solide est un … Le permanganate de potassium solide est un [https://fr.wikipedia.org/wiki/Oxydant oxydant] très puissant. Il se produit une réaction très [https://fr.wikipedia.org/wiki/R%C3%A9action_exothermique exothermique] lorsqu'il est mélangé à de la [https://fr.wikipedia.org/wiki/Glyc%C3%A9rine glycérine]. Il peut alors se produire une [https://fr.wikipedia.org/wiki/Combustion_spontan%C3%A9e combustion spontanée] qui peut faire [https://fr.wikipedia.org/wiki/Fusion_(physique) fondre] le [https://fr.wikipedia.org/wiki/Verre verre] et un grand nombre de récipients et peut enflammer toutes substances inflammables proches. Ce type de réaction peut se produire lorsque du permanganate de potassium KMnO4 solide est mis en contact avec un grand nombre de composés organiques. Les solutions aqueuses de KMnO4, et notamment les solutions diluées, sont nettement moins dangereuses. Le mélange de permanganate de potassium et d'[https://fr.wikipedia.org/wiki/Acide_sulfurique acide sulfurique] concentré produit du Mn2O7 qui peut être à l'origine d'une [https://fr.wikipedia.org/wiki/Explosion explosion]. Le permanganate de potassium ne doit jamais être conservé proche de [https://fr.wikipedia.org/wiki/P%C3%A9trole pétrole] ou de toute substance facilement oxydable. Enfin, le mélange de permanganate de potassium et d'[https://fr.wikipedia.org/wiki/Acide_chlorhydrique acide chlorhydrique] concentré produit du [https://fr.wikipedia.org/wiki/Dichlore dichlore], un [https://fr.wikipedia.org/wiki/Gaz gaz] hautement [https://fr.wikipedia.org/wiki/Toxicit%C3%A9 toxique].kipedia.org/wiki/Gaz gaz] hautement [https://fr.wikipedia.org/wiki/Toxicit%C3%A9 toxique].)
- Item:Photolangage + (Le photolangage est un outil/un support d' … Le photolangage est un outil/un support d'animation qui permet à chacun de s'exprimer sur ses représentations personnelles. C'est un outil qui s'adapte à n'importe quel sujet et n'importe quelle tranche d'âge. Il est réalisé la plupart du temps en début d'animation ou de déroulé pédagogique car il permet : - D'introduire un sujet/une thématique - De faire émerger les représentations de chacun - De s'exprimer dans un cadre d'écoute et de bienveillance - D'évaluer les connaissances du groupe L’animateur devra s'assurer que tous les participants sont d'accord avec les trois points suivants: * Le secret : tout ce qui se vit dans le groupe reste dans le groupe. * La bienveillance : aucun jugement ne devra être porté sur le choix d’une photo ou son explication. * La sincérité : chacun doit faire un choix en conscience, le plus spontanément possible, puis s’exprimer le plus librement possible à son propos. Si une photo est choisie par deux participants, pas de problème : les deux pourront s'exprimer sur la même image Après ce temps d’explication, l’animateur peut débuter l’activité'''''.''''' Quelques conseils : N'oubliez-pas d'adapter vos images à votre public / Ayez la plus grande diversité d'images possibles / Rajoutez des images au fur et mesure de vos expériences / Prévoyez 3 fois plus d'images que de participantsz 3 fois plus d'images que de participants)
- Item:Scotch conducteur + (Le ruban adhésif conducteur : C'est quoi … Le ruban adhésif conducteur : C'est quoi ? Le scotch conducteur ressemble à du ruban adhésif classique, mais il laisse passer l'électricité ! Contrairement au scotch en plastique qui bloque le courant (c’est un isolant), celui-ci est fabriqué avec du métal. Le plus souvent, il est en cuivre (couleur orange brillant) ou en aluminium (couleur argent). À quoi ça sert ? Créer des circuits sur papier : Tu peux coller des bandes de scotch sur une feuille pour relier une pile à une petite lampe (LED). Pas besoin de fils qui s'emmêlent ! Réparer des objets : On l'utilise parfois pour rétablir un contact électrique dans une télécommande ou un petit appareil. Bloquer les ondes : Le métal peut servir de "bouclier" pour empêcher les interférences électriques (par exemple, à l'intérieur d'une guitare électrique). Les alternatives : Si je n'en ai pas, je fais comment ? Papier aluminium Découpe des bandes d'alu de cuisine et fixe-les avec du scotch normal. Crayon à papier (Mines de graphite) Colorie un trait très épais et noir sur du papier. Le graphite conduit un peu l'électricité ! Peinture conductrice Une peinture spéciale qui contient du métal. On dessine son circuit au pinceau. Fil de fer ou trombones Idéal pour faire des ponts entre deux points. Le petit conseil de Nadia : > Attention, le côté "collant" du scotch conducteur ne laisse pas toujours passer le courant aussi bien que le côté brillant. Pour faire une bonne connexion, il vaut mieux replier le bout du ruban sur lui-même pour que les faces brillantes se touchent !e pour que les faces brillantes se touchent !)
- Item:Trombone + (Le trombone est constitué d'une tige en mé … Le trombone est constitué d'une tige en métal (ou en matière plastique) repliée plusieurs fois afin de former plusieurs boucles. Sa forme rappelle le trombone, d'où elle tire son nom. [Wikipédia] Le trombone est constitué d'une tige en [https://fr.wikipedia.org/wiki/M%C3%A9tal métal] (ou en matière [https://fr.wikipedia.org/wiki/Mati%C3%A8re_plastique plastique]) repliée plusieurs fois afin de former plusieurs boucles. Sa forme rappelle le [https://fr.wikipedia.org/wiki/Trombone_(instrument) trombone], d'où elle tire son nom. Le trombone original demeure le plus utilisé bien qu'il en existe de multiples variantes. Il est en effet aisé à utiliser, serre bien sans déchirer et s'empile sans se tordre notablement. Certains historiens attribuent aux [https://fr.wikipedia.org/wiki/Byzance Byzantins] la création du trombone. Mais si l'on retient l'idée que le terme de trombone aurait été choisi en référence à l'instrument de musique, alors il faut en conclure le nom originel devait être tout autre. Les premiers trombones, faits de [https://fr.wikipedia.org/wiki/Bronze bronze], demeurent chers à produire et ne servent à l'époque que pour lier les plus précieux documents impériaux. Les trombones faits de fil plié n'ont jamais été brevetés, mais étaient probablement produits en [https://fr.wikipedia.org/wiki/Grande-Bretagne Grande-Bretagne] par ''The Gem Manufacturing Company'' dans les [https://fr.wikipedia.org/wiki/Ann%C3%A9es_1890 années 1890]. Pour cette raison, il est parfois appelé « ''Gem clip'' » en anglais, alors qu'en suédois, tous les types de trombone sont appelés « ''gem'' ». Une demande de [https://fr.wikipedia.org/wiki/United_States_Patent_and_Trademark_Office brevet américain] pour une machine-outil destinée à produire ce type de trombone est déposée le par William Middlebrook à [https://fr.wikipedia.org/wiki/Waterbury_(Connecticut) Waterbury] ([https://fr.wikipedia.org/wiki/Connecticut Connecticut]). Le brevet (U.S Patent N° 636272) lui est accordé le [https://fr.wikipedia.org/wiki/Trombone_(papeterie)#cite_note-1 1]. Plié convenablement, il sert comme outil à [https://fr.wikipedia.org/wiki/Crochetage crocheter]. Il est aussi utile pour appuyer sur un bouton destiné à enclencher un mécanisme qui libère un [https://fr.wikipedia.org/wiki/CD-ROM CD] pris dans un lecteur CD. Également, des personnes l'utilisent pour appuyer sur un minuscule bouton qui sert généralement à supprimer toutes les données à l'arrière des [https://fr.wikipedia.org/wiki/Calculatrice calculatrices] des [https://fr.wikipedia.org/wiki/Assistant_personnel PDA] ou des modems-câble. Correctement placé, il permet d'extraire de son emplacement, la [https://fr.wikipedia.org/wiki/Carte_SIM carte SIM] d'un téléphone. Le trombone est aussi un bijou. Les [https://fr.wikipedia.org/wiki/Mouvement_punk punks] l'utilisent encore comme des [https://fr.wikipedia.org/wiki/Piercing piercings] (oreille ou nez) et certaines filles s'en servent comme épingle à cheveux. Le trombone est fabriqué à partir d'un fil d'[https://fr.wikipedia.org/wiki/Acier acier] unique d'environ 1/16 pouces (environs 1,6 mm) de diamètre et est de longueur variable selon le modèle. En règle générale, il est constitué de trois boucles, une à chaque extrémité environ au quart de la longueur totale de la broche et d'une troisième au centre qui fera pression par un mouvement de torsion, pour réunir les deux autres. Certains trombones sont en [https://fr.wikipedia.org/wiki/Acier_inoxydable acier inoxydable] (ce qui est important lorsque les documents sont destinés à un archivage à long terme). Il existe également des trombones en plastique. à un archivage à long terme). Il existe également des trombones en plastique.)
- Item:Bouteille plastique + (Les bouteilles de boisson gazeuses sont pour la plupart en PET (Polyéthylène téréphtalate). Les grande bouteilles de Lessive liquide sont souvent en PEHD (Haute Densité). Bref, à chaque bouteille sa matière !)
- Item:Miroir + (Les miroirs d'abord utilisés étaient très … Les miroirs d'abord utilisés étaient très probablement des plans d'eau sombre et calme, ou de l'eau recueillie dans un récipient (tel Moïse qui fit un bassin d'airain avec les miroirs de femmes[https://fr.wikipedia.org/wiki/Miroir#cite_note-1 1]). Les premiers miroirs fabriqués étaient des morceaux de pierre polie comme l'[https://fr.wikipedia.org/wiki/Obsidienne obsidienne], un verre volcanique naturel : les exemples les plus anciens d'obsidienne trouvés en [https://fr.wikipedia.org/wiki/Anatolie Anatolie] sont datés d'environ 6000 av. J.-C. Des miroirs plus réfléchissants en surface métallique polie furent ensuite conçus : miroirs en cuivre poli datés en Mésopotamie à partir de 4000 av. J.-C. et dans l’Égypte ancienne aux environs de 3000 ans av. J.-C. ; miroirs en bronze poli fabriqués en Chine à partir de 2000 ans av. J.-C.[https://fr.wikipedia.org/wiki/Miroir#cite_note-2 2]. Miroir en bronze doré décoré de Léda et le cygne, art romain, IIe siècle Les Romains utilisaient principalement des miroirs en alliage d'[https://fr.wikipedia.org/wiki/%C3%89tain étain] (d'où le terme de [https://fr.wikipedia.org/wiki/Tain tain] pour désigner cette couche) et de [https://fr.wikipedia.org/wiki/Cuivre cuivre], puis d'[https://fr.wikipedia.org/wiki/Argent argent], mais aussi des miroirs en verre recouvert d'[https://fr.wikipedia.org/wiki/Or or] ou de [https://fr.wikipedia.org/wiki/Plomb plomb] fondu[https://fr.wikipedia.org/wiki/Miroir#cite_note-3 3]. Les miroirs en alliage métallique s'oxydant rapidement, on y attachait une éponge pour les nettoyer et une pierre ponce pour les repolir. Le miroir en verre évite ce défaut. Le moment de son apparition est mal connu et son existence durant l'antiquité est l'objet de débats[https://fr.wikipedia.org/wiki/Miroir#cite_note-:0-4 4]. Seuls deux auteurs évoquent un tel objet : [https://fr.wikipedia.org/wiki/Alexandre_d%27Aphrodisias Alexandre d'Aphrodisias] au [https://fr.wikipedia.org/wiki/IIIe_si%C3%A8cle IIIe siècle] et, avant lui, [https://fr.wikipedia.org/wiki/Pline_l%27Ancien Pline l'Ancien] qui évoque son invention à [https://fr.wikipedia.org/wiki/Sidon Sidon] et ses « fabricants de verre » au [https://fr.wikipedia.org/wiki/Ier_si%C3%A8cle Ier siècle] mais les traces archéologiques font remonter les premiers exemplaires au [https://fr.wikipedia.org/wiki/IIIe_si%C3%A8cle IIIe siècle] que l'on trouve essentiellement en [https://fr.wikipedia.org/wiki/%C3%89gypte_antique Égypte], en [https://fr.wikipedia.org/wiki/Asie_Mineure Asie mineure], en [https://fr.wikipedia.org/wiki/Germanie Germanie] et en [https://fr.wikipedia.org/wiki/Gaule Gaule], à [https://fr.wikipedia.org/wiki/Reims Reims][https://fr.wikipedia.org/wiki/Miroir#cite_note-:0-4 4]. Il est alors constitué d'une plaque de verre dont la surface arrière était garnie d'une feuille de métal[https://fr.wikipedia.org/wiki/Miroir#cite_note-5 5] mais ils sont très petits - de 2 à 7 centimètres de diamètre - et s'apparentent davantage à des amulettes ou des éléments de parure[https://fr.wikipedia.org/wiki/Miroir#cite_note-:0-4 4]. La qualité médiocre de ceux-ci leur fera préférer les miroirs en métal pendant plusieurs siècles encore[https://fr.wikipedia.org/wiki/Miroir#cite_note-:0-4 4]. [https://fr.wikipedia.org/wiki/Miroir_en_bronze Miroir en bronze], période des [https://fr.wikipedia.org/wiki/Cinq_dynasties cinq dynasties] (907-960), Chine, [https://fr.wikipedia.org/wiki/Mus%C3%A9e_de_Suzhou Musée de Suzhou]. Les Chinois ont commencé à faire des miroirs en utilisant des amalgames argent-mercure dès le [https://fr.wikipedia.org/wiki/Ve_si%C3%A8cle Ve siècle][https://fr.wikipedia.org/wiki/Miroir#cite_note-6 6]. Au [https://fr.wikipedia.org/wiki/Moyen_%C3%82ge Moyen Âge], les miroirs sont sertis dans de petites boîtes à deux couvercles appelés « valves de miroir » qu'il faut dévisser pour voir le miroir[https://fr.wikipedia.org/wiki/Miroir#cite_note-7 7]. À la Renaissance, les fabricants européens mettent au point une méthode supérieure de miroir en verre recouvert d'un amalgame d'étain-mercure. La date exacte et le lieu de la découverte sont inconnus, mais Venise est réputée au [https://fr.wikipedia.org/wiki/XVIe_si%C3%A8cle XVIe siècle] pour ses verreries utilisant cette nouvelle technique. Les miroirs et [https://fr.wikipedia.org/wiki/Glace_(miroiterie) glaces] de cette époque restent des produits de luxe. La [https://fr.wikipedia.org/wiki/Manufacture_royale_de_glaces_de_miroirs Manufacture royale de glaces de miroirs], futur Saint-Gobain, en est un fabricant important, de même que les verreries germaniques et de Bohême qui produisaient des miroirs à un coût moindre[https://fr.wikipedia.org/wiki/Miroir#cite_note-8 8]. L'invention du miroir argenté en verre est créditée au chimiste allemand [https://fr.wikipedia.org/wiki/Justus_von_Liebig Justus von Liebig] en 1835 : l'amalgame d'étain-mercure étant toxique, il le remplaça par le dépôt d'une fine couche d'argent métallique sur le verre grâce à la réduction chimique du [https://fr.wikipedia.org/wiki/Nitrate_d%27argent nitrate d'argent]. Ce processus d'[https://fr.wikipedia.org/wiki/Argenture argenture] a permis la fabrication en masse des miroirs et a rendu leurs prix abordables[https://fr.wikipedia.org/wiki/Miroir#cite_note-9 9]. ''Femme assise tenant un miroir''. [https://fr.wikipedia.org/wiki/Gr%C3%A8ce_antique Grèce antique] [https://fr.wikipedia.org/wiki/C%C3%A9ramique_%C3%A0_figures_rouges Céramique à figures rouges] [https://fr.wikipedia.org/wiki/L%C3%A9cythe Lécythe], ca. 470–460 av. J.-C., [https://fr.wikipedia.org/wiki/Mus%C3%A9e_national_arch%C3%A9ologique_d%27Ath%C3%A8nes Musée national archéologique d'Athènes] Dans les cultures rurales, le miroir a été longtemps un objet sans utilité vitale et par conséquent, relevant du [https://fr.wikipedia.org/wiki/Luxe luxe] propre aux classes aisées. Jusqu'à la fin du XIXe siècle, le [https://fr.wikipedia.org/wiki/Paysan paysan] n'en possédait pas et n'en faisait habituellement usage que chez le [https://fr.wikipedia.org/wiki/Coiffeur coiffeur][https://fr.wikipedia.org/wiki/Miroir#cite_note-10 10]. S'il était aisé, sa femme pouvait également se mirer à l'occasion de certaines emplettes ([https://fr.wikipedia.org/wiki/Modiste modiste]). Ses compagnes moins fortunées devaient se contenter de fragments de miroir ou choisir un petit miroir dans l'éventaire d'un [https://fr.wikipedia.org/wiki/Colporteur colporteur]. Encore, ces miroirs sont-ils de taille réduite et ne permettant pas de se voir aisément de la tête au pied[https://fr.wikipedia.org/wiki/Miroir#cite_note-11 11]. La hausse du [https://fr.wikipedia.org/wiki/Niveau_de_vie niveau de vie] a favorisé la [https://fr.wikipedia.org/wiki/Commerce commercialisation] des miroirs, de tous types et dans tous les milieux. En se répandant ainsi, cet objet – ami de [https://fr.wikipedia.org/wiki/Narcisse_(mythologie) Narcisse] – a participé à diverses modifications des mentalités, attitudes et comportements, en particulier dans le domaine de l'image de soi et de l'[https://fr.wikipedia.org/wiki/Esth%C3%A9tique esthétique]. Finalement, au cours du XXe siècle, les ''miroirs en pied'' sont devenus un élément standard de la [https://fr.wikipedia.org/wiki/Chambre_%C3%A0_coucher chambre à coucher], puis une ou deux décennies plus tard de la [https://fr.wikipedia.org/wiki/Salle_de_bains salle de bains]. Ces miroirs en permettant d'avoir une bonne idée de la façon dont les autres nous voient, vont être d'un usage quotidien en proportion de la préoccupation de l'image donnée, de la même manière que le miroir simple est utilisé pour le contrôle des [https://fr.wikipedia.org/wiki/Cosm%C3%A9tique soins cosmétiques] du visage, particulièrement du [https://fr.wikipedia.org/wiki/Maquillage maquillage]. Intégré aussi intimement aux mœurs, le miroir ne peut qu'accélérer leur évolution et diffusion : ainsi, il permet aux individus de suivre les variations de la [https://fr.wikipedia.org/wiki/Mode_(habillement) mode] plus rapidement, jusqu'à influencer leur [https://fr.wikipedia.org/wiki/Silhouette silhouette][https://fr.wikipedia.org/wiki/Miroir#cite_note-12 12]. Aujourd'hui, les miroirs sont le plus souvent produits par le [https://fr.wikipedia.org/wiki/D%C3%A9p%C3%B4t_sous_vide dépôt sous vide] (par PVD ''Physical Vapor Deposition'' ou CVD ''Chemical Vapor Deposition'') ou par dépôt électrolytique sur une plaque de verre (plus ou moins épaisse, elle sert de support et de protection) d'une couche réfléchissante d'[https://fr.wikipedia.org/wiki/Aluminium aluminium] (plus rarement d'argent qui s'oxyde rapidement, ces miroirs modernes réfléchissant 80 % de la lumière totale) et d'une couche de cuivre ou de plomb (tain du miroir le rendant opaque).dépôt sous vide] (par PVD ''Physical Vapor Deposition'' ou CVD ''Chemical Vapor Deposition'') ou par dépôt électrolytique sur une plaque de verre (plus ou moins épaisse, elle sert de support et de protection) d'une couche réfléchissante d'[https://fr.wikipedia.org/wiki/Aluminium aluminium] (plus rarement d'argent qui s'oxyde rapidement, ces miroirs modernes réfléchissant 80 % de la lumière totale) et d'une couche de cuivre ou de plomb (tain du miroir le rendant opaque).)
- Item:Thermorésistance + (Les principaux capteurs de température uti … Les principaux capteurs de température utilisés en électronique sont basés sur la variation de la [https://fr.wikipedia.org/wiki/R%C3%A9sistance_(%C3%A9lectricit%C3%A9) résistance électrique] en fonction de la température. Couramment, on différencie les '''thermo-résistances''' des '''thermistances''' comme suit : ; Thermo-résistances : augmentation régulière de la résistivité de certains métaux (argent, cuivre, nickel, or, [https://fr.wikipedia.org/wiki/Thermom%C3%A8tre_%C3%A0_r%C3%A9sistance_de_platine platine], tungstène, titane) avec l'augmentation de la température. ; Thermistances : variation (plus importante) de la résistance d'autres matières (oxydes métalliques, composites) en fonction de la température, cette variation pouvant être assez irrégulière ou soudaine, dans un domaine étroit de température. ; Capteurs de température au [https://fr.wikipedia.org/wiki/Silicium silicium] : dont la plupart basés sur la dépendance de la tension d'une jonction [https://fr.wikipedia.org/wiki/Diodes diodes] en fonction de la température plutôt que de la résistance proprement dite. Suivant le niveau de [https://fr.wikipedia.org/wiki/Dopage_(semi-conducteur) dopage], les résistances à base de matériaux [https://fr.wikipedia.org/wiki/Semi-conducteur semi-conducteurs] peuvent avoir un coefficient en température négatif (dopage faible) ou positif (dopage élevé). == Principales caractéristiques == Les principales caractéristiques de ces capteurs sont : Précision, Non Linéarité, Valeur nominale pour une température donnée (à 25 °C), [https://fr.wikipedia.org/wiki/Temps_de_r%C3%A9ponse_(%C3%A9lectronique) Temps de réponse] (en milli seconde ou seconde), Sensibilité ou coefficient de température (variation de la résistance en fonction de la température), Étendue ou gamme de mesure (température min. et max. d’utilisation), Durée de vie, Stabilité (variation des différents paramètres dans le temps), Faible encombrement, coût, puissance. Les CTP (Coefficient de Température Positif, en anglais PTC, ''Positive Temperature Coefficient'') sont des thermistances dont la résistance augmente avec la température. On distingue les '''thermo-résistances''' (augmentation continue et régulière de la résistance avec la température, voir ci-dessus) des CTP dont la valeur augmente fortement avec la température dans une plage de température limitée (typiquement entre 0 °C et 100 °C). Pour ces dernières, il y a deux types principaux : * CTP fabriquées à base de [https://fr.wikipedia.org/wiki/Titanate_de_baryum titanate de baryum]. Leur valeur augmente brutalement dans un domaine étroit de température, puis diminue progressivement au-delà de cette zone. Elles sont comme les ''CTN'', disponibles en différentes variantes et valeurs, et sont plutôt utilisées comme capteurs. * CTP polymère-carbone. Leur valeur augmente aussi brutalement dans un domaine de température étroit, mais sans diminution au-delà. Elles sont principalement utilisées comme [https://fr.wikipedia.org/wiki/Fusible_r%C3%A9armable_PTC fusibles réarmables]. Les CTP peuvent être utilisées comme : * détecteur de température, pour protéger des composants ([https://fr.wikipedia.org/wiki/Moteur moteurs], [https://fr.wikipedia.org/wiki/Transformateur transformateurs]) contre une élévation excessive de la température ; * protection contre des surintensités[https://fr.wikipedia.org/wiki/Thermistance#cite_note-4 2] ; * détecteur de niveau de liquide : la température de la CTP et donc sa résistance, sera différente lorsque le capteur est dans l'air ou plongé dans un liquide.a résistance, sera différente lorsque le capteur est dans l'air ou plongé dans un liquide.)
- Item:Tube a essaie + (Les tubes à essais ont de multiples utilis … Les tubes à essais ont de multiples utilisations, aussi se déclinent-ils en une multitude de formes, de tailles et de matériaux : * la forme la plus classique est celle représentée en bleu sur le schéma, avec un fond en U et un bord droit ; on s'en sert pour conserver des échantillons, réaliser des tests simples et chauffer un liquide ; * la forme évasée permet un transvasement plus facile ; * la forme conique est surtout utilisée pour la centrifugation ; * les tubes ''[https://fr.wikipedia.org/wiki/Vacutainer Vacutainer]'' sont utilisés pour les [https://fr.wikipedia.org/wiki/H%C3%A9mogramme hémogrammes] ; * les [https://fr.wikipedia.org/wiki/Tube_de_15_ml tubes de 15 ml] et de [https://fr.wikipedia.org/wiki/Tube_de_50_ml 50 ml], utilisés en biologie. Les tubes à essais sont généralement utilisés par ensemble ou série plus ou moins important ; de nombreux dispositifs en facilitent le maintien, la manipulation, le déplacement, ou sont le socle d'opérations automatiques.u sont le socle d'opérations automatiques.)
- Item:Camembert + (Lors de la fabrication, des micro-organism … Lors de la fabrication, des micro-organismes tels que bactéries et champignons microscopiques jouent un rôle majeur dans l’industrie de transformation du lait. Il se retrouve donc dans le camembert. Ainsi sur la croute, on retrouve une biodiversité bactérienne, qui permettent de donner le goût et l'aspect du camembert. Il se trouve chez votre fromager préféré, où dans les rayons frais des magasins alimentaires. Il se trouve chez votre fromager préféré, où dans les rayons frais des magasins alimentaires. On le mange à la fin du repas, soit avant le désert soit à la place. On peut aussi le faire chauffer au four, entourer d'aluminium pour le rendre fondant.tourer d'aluminium pour le rendre fondant.)
- Item:Tournevis + (L’invention de la forme prématurée de la v … L’invention de la forme prématurée de la vis (ressemblant à une spirale) est estimée à environ mais n’avait pas encore acquit d’utilité particulière vu qu’elle ne faisait office que d’élément décoratif pour armes et bijoux. Bien longtemps après, vers la fin de l’Antiquité (autour du [https://fr.wikipedia.org/wiki/Ve_si%C3%A8cle Ve siècle]), certains filetages furent distinguables sur des bouts cylindriques de matière, pourtant toujours pas voués à la fixation ou la transmission de mouvement (fonctions principales de la vis de nos jours). Bien que l’origine géographique précise de la vis contemporaine demeure inconnue, certains auteurs suggèrent l’espace du Proche-Orient, plus précisément en Assyrie, où elle fut principalement utilisée afin d’irriguer les jardins suspendus de Babylone. Les premiers traités « scientifiques » de la vis sont attribués à Archimède [https://fr.wikipedia.org/wiki/IIIe_si%C3%A8cle_av._J.-C. IIIe siècle av. J.-C.] lors de l’invention de ce qui est connu de nos jours comme « la vis d’Archimède », un système utilisant le principe de la vis sans fin principalement dans le but de pomper un liquide à partir d’une position plus élevée que sa surface. Il permit ainsi à des milliers de paysans Égyptiens d’irriguer leur jardin avec l’eau du Nil sans qu’ils ne doivent la transporter eux-mêmes.[1,2,3] == Composition == Cet outil est formé d'une tige, généralement métallique, munie d'un manche et dont l'extrémité s'adapte à la tête d'une [https://fr.wikipedia.org/wiki/Vis_de_fixation vis]. La tige est souvent de section ronde, elle peut être de section carrée et peut alors recevoir une [https://fr.wikipedia.org/wiki/Cl%C3%A9_(outil) clé] plate pour aider au serrage ou desserrage. Il existe plusieurs types de tournevis adaptés aux différents types de vis : à tête fendue, [https://fr.wikipedia.org/wiki/Vis_cruciforme cruciforme] Phillips, cruciforme [https://fr.wikipedia.org/wiki/Vis_Pozidriv Pozidriv], [https://fr.wikipedia.org/wiki/Cl%C3%A9_Torx Torx], [https://fr.wikipedia.org/wiki/Tri-Wing Tri-Wing], etc. La poignée (ou manche), autrefois en bois, est aujourd'hui principalement en [https://fr.wikipedia.org/wiki/Mat%C3%A9riau_synth%C3%A9tique matériau synthétique] (parfois [https://fr.wikipedia.org/wiki/Isolant#Isolant_électrique isolant]) et possède une forme plus ou moins Le tournevis est un outil très largement répandu, depuis le [https://fr.wikipedia.org/wiki/M%C3%A9canique_(science) mécanicien] ou l'[https://fr.wikipedia.org/wiki/%C3%89b%C3%A9niste ébéniste] jusqu'au [https://fr.wikipedia.org/wiki/Chirurgie chirurgien]. Il en existe de multiples versions spécialement adaptées à des usages précis. * Le tournevis dynamométrique est la version ultime de l'outil. Il permet le contrôle du [https://fr.wikipedia.org/wiki/Moment_d%27une_force_(m%C3%A9canique)#Moment_d'un_couple_de_forces couple de serrage], avec une excellente répétabilité. Il est utilisé en particulier sur les chaînes de montage. * Le tournevis testeur, qui inclut une [https://fr.wikipedia.org/wiki/Lampe lampe] témoin lui permettant de détecter la présence de [https://fr.wikipedia.org/wiki/Tension_%C3%A9lectrique tension] entre 100 et 500 [https://fr.wikipedia.org/wiki/Volt volts] sur un point de circuit d'une installation. Il est également destiné au serrage des vis de connexion des câbles. Il est utilisé en particulier par les électriciens. * Le tournevis à frapper est un outil au corps massif dont l’intérieur est composé d'un mécanisme simple et robuste qui transforme un mouvement linéaire (celui du coup de marteau) en un mouvement de rotation. Cet outil permet le desserrage d'une vis bloquée, ou à l'inverse un serrage puissant.linéaire (celui du coup de marteau) en un mouvement de rotation. Cet outil permet le desserrage d'une vis bloquée, ou à l'inverse un serrage puissant.)
- Item:Générateur d'hydrogène + (MATERIEL ELECTRIQUE : *Alimentation d’une … MATERIEL ELECTRIQUE : *Alimentation d’une tour de PC (cablage https://www.latelierdugeek.fr/2013/05/11/transformer-une-alimentation-de-pc-en-alimentation-datelier. Une bonne alimentation facilite l’efficacité du système et évite de griller son alim en cas de surcharge. *Des dominos ou bornier elec ou wago (très pratique), bref de quoi connecter facilement *Multimètre ou ampèremètre (non obligatoire mais très pratique si on ne veut pas tâtonner trop longtemps) *Fil électrique 1,5mm² , de couleur différente si possible (rouge et bleu). Si vous n'avez que du fin (lampe de chevet) attention à ne pas dépasser les 10A. * *Electrode métode 1 : Plaque fine de métal, pour le mieux serait du graphite, de l'inox mais bon... du zinc, gouttière, tole fine de matériel d'ordinateur ... à découper. Sinon on peut trouver des pièces sous la bonne forme ... à vous d'être imagitatif ou d'acheter.. *Soudure à l’étaing (peut être facultatif) *Isolant mince, 2-4 mm (plastique de classeur par exemple ou autre) * *Electrode métode 2 : *tige fileté 6mm *40 cm *écrou *20, quelques rondelles. *un matériau isolant minimum 1*2*5 (ici bois) *Plaque de métal fine à découper. * *Electrode méthode 3: non traiter ici mais il y plein de façons de faire. * * *OUTILLAGE ET MATERIEL *Tefelon (pour parfaire l’étanchéité si besoin) *Tuyau fin et si possible souple. (astuce : gaine de câble d’électicien) *Colle solide (type epoxy..) *Scotch électricien (barnier) *Valves chambres à airs. Non obligatoires mais si on a du tuyau souple et mou ça peut petre pratique pour rendre le systeme flexible et démontable. *Outillage assez complet : perceuse, foret métal, pince coupante, tournevis, cisaille à tôle ou meuleuse ...(dépend du type d’électrolyseur) *RECIPIENT: *Pots de confiture : 2 grands (pour électrolyseur et nettoyage), 1 moyen (anti retour de flamme), 1 petit (pour faire des bulles) *Des couvercles supplémentaires pour ranger le systeme et ne pas avoir à jeter nos liquides. * *ELECTROLYTE : *Eau (distillé si possible, évite l’encrassement, oxydation, sinon eau normal pas de soucis) *Soude (marche bien et facile à trouver), éviter le sel (dégage un gaz toxique), le bicarbonnate (détériore les électrodes) https://www.generateurhho.com/conseils-technique-truc-astuces/les-differents-electrolytes * *ACCESSOIRES *Liquide vaisselle *Petite cuillère. *briquetces/les-differents-electrolytes</u> * *ACCESSOIRES *Liquide vaisselle *Petite cuillère. *briquet)
- Item:Crayon gris + (On parle de « crayon-mine », de « crayon d … On parle de « crayon-mine », de « crayon de mine », de « crayon à papier », de « crayon de papier », de « crayon de bois » ou « crayon gris », « crayon de plomb » ou « crayon à mine » ou simplement « crayon ».
Les crayons ont différentes duretés. Le degré de dureté des mines de crayons est défini par l’échelle suivante :
* '''H''' (''hard'') : dure (ou sèche); * '''B''' (''black'') : tendre (ou grasse) ; * '''HB''' (''hard black'') : moyenne ; * '''F''' (''fine point'') : fine. Il s’agit du milieu de l’échelle, ''HB'' étant un peu plus tendre. Une mine dure est sèche, précise et durable, mais manque de noirceur ; une mine tendre est grasse et a une bonne noirceur, mais s’use rapidement. L’utilisateur d’un crayon choisit le type de mine en fonction de l’usage auquel il le destine : * '''pour un dessin technique''' qui exige la clarté du tracé et la précision des traits, le choix se porte vers une mine très sèche ('''type 3H à 9H'''). Ce type de construction graphique nécessite parfois un encrage du support (calque ou polyester) pour permettre la reproduction. Aujourd'hui, beaucoup préfèrent utiliser un portemine équipé de mines de diamètre très fin (0,3 mm) qui ont l’avantage de donner un trait fin. Cependant, même avec une pointe fine, l'épaisseur du trait varie, de par l'inclinaison du porte-mine. Aussi nombre de dessinateurs de métiers anciens (exemple dessin d'atelier d'ébénisterie), plus puristes, utilisent encore des porte-mines à mines très épaisses, qu'ils taillent eux-mêmes sur un papier de verre, afin de le conserver en permanence en pointe. * '''pour un dessin aux instruments''' qui exige construction et précision avec une certaine sensibilité, la mine de dureté moyenne '''type HB''' est particulièrement adaptée ; en effet, elle permet un certain « repentir » (utilisation de la [https://fr.wikipedia.org/wiki/Gomme_%C3%A0_effacer gomme]) sans détruire la qualité du dessin initial. * '''pour un dessin artistique''', croquis ou dessin à main levée, la '''mine 2B''' ou plus, existant en portemine de 0,5 mm à 0,7 mm ou 1,2 mm de diamètre, ou crayon classique, permet l’exploitation de toutes les techniques d’expression graphiques ; cependant l’utilisation du « repentir » (la gomme) peut empâter le dessin et est souvent proscrite. La [https://fr.wikipedia.org/wiki/Gomme_mie_de_pain gomme mie de pain] est plus efficace sur ce type de marques. Dans un usage « artistique », le crayon permet de jouer avec la finesse du trait par la taille précise de la mine et l’usage de la pointe, ou d’en varier la texture et l’épaisseur en utilisant une mine plus émoussée, ou en inclinant le crayon de manière à avoir une surface de mine plus importante en contact avec le papier : se rapprochant ainsi des possibilités offertes par les mines de plomb, craies ou fusains qui sont dépourvus de la gaine de bois du crayon. Les mines contiennent de l’[https://fr.wikipedia.org/wiki/Argile argile] et du [https://fr.wikipedia.org/wiki/Graphite graphite]. Une mine tendre contient moins d’argile et une mine dure moins de graphite. Le graphite apporte le côté « gras » à la mine par son pouvoir lubrifiant, alors que l’argile est au contraire une charge maigre. Le modèle HB, le plus utilisé par les consommateurs, est en quelque sorte le modèle standard, les autres sont réservés aux artistes ou à des professionnels, comme les [https://fr.wikipedia.org/wiki/Architecte architectes]. L'épaisseur typique d'un trait de crayon est de quelques dizaines de nanomètres, soit une centaine de couches atomiques[https://fr.wikipedia.org/wiki/Crayon_gris#cite_note-5 5]. L’échelle servant à classer la dureté des mines a été créée par la maison Brookmann qui exploitait les mines de graphite de Borrowdale en Angleterre ; d'où le code de lettres faisant référence à des mots anglais. Originellement, il comprenait six duretés : B, BB, F, HB, H, HH, le dernier contenant une proportion plus importante d'argile, le premier une teneur en graphite relativement élevée[https://fr.wikipedia.org/wiki/Crayon_gris#cite_note-Pey29-2 2]. Ensuite [https://fr.wikipedia.org/wiki/Faber-Castell Lothar von Faber] vers [https://fr.wikipedia.org/wiki/1839 1839] l'a développée ; elle est très courante en France. Source sous licence CC-By-Sa - [https://fr.wikipedia.org/wiki/Crayon Wikipédia]ernier contenant une proportion plus importante d'argile, le premier une teneur en graphite relativement élevée[https://fr.wikipedia.org/wiki/Crayon_gris#cite_note-Pey29-2 2]. Ensuite [https://fr.wikipedia.org/wiki/Faber-Castell Lothar von Faber] vers [https://fr.wikipedia.org/wiki/1839 1839] l'a développée ; elle est très courante en France. Source sous licence CC-By-Sa - [https://fr.wikipedia.org/wiki/Crayon Wikipédia])9H 8H 7H 6H 5H 4H 3H 2H H F HB B 2B 3B 4B 5B 6B 7B 8B 9B Dure → Moyenne → Tendre - Item:Perceuse + (Outil de bricolage, la perceuse est munie … Outil de bricolage, la perceuse est munie d'une vrille tournant par la force d'un moteur. Appuyée contre une paroi ou une planche de bois, la vrille y perce une ouverture de sa taille. == [[http://www.wikidebrouillard.org/index.php?title=Perceuse&action=edit§ion=2 modifier]] Où la trouver facilement ? == Dans l'atelier de papa, ou dans un magasin de bricolage. == [[http://www.wikidebrouillard.org/index.php?title=Perceuse&action=edit§ion=3 modifier]] Utilisations dans la vie quotidienne == La perceuse sert principalement à percer des trous. == [[http://www.wikidebrouillard.org/index.php?title=Perceuse&action=edit§ion=4 modifier]] Expériences utilisant une perceuse sur Wikidébrouillard == * [http://www.wikidebrouillard.org/index.php?title=P%C3%A9riscope Périscope] * [http://www.wikidebrouillard.org/index.php?title=Photographier_sans_appareil_photo_!! Photographier sans appareil photo !!] * [http://www.wikidebrouillard.org/index.php?title=Une_horloge_compl%C3%A8tement_siphonn%C3%A9e Une horloge complètement siphonnée] * [http://www.wikidebrouillard.org/index.php?title=Aspiration_fa%C3%A7on_Bernoulli Aspiration façon Bernoulli] == [[http://www.wikidebrouillard.org/index.php?title=Perceuse&action=edit§ion=5 modifier]] Plus d'informations sur Perceuse == Précautions d'utilisation Utiliser cet outil demande de la vigilance La vrille en rotation est très puissante et peut blesser, aussi il ne faut pas en approcher la main. Prenez soin de placer l'appareil en position de sécurité (débranché, ou verrouillé) pour manipuler la vrille, lorsque vous changez de diamètre de perçage.lé) pour manipuler la vrille, lorsque vous changez de diamètre de perçage.)
- Item:Serre-joint + (Son rôle est de serrer des pièces les unes … Son rôle est de serrer des pièces les unes contre les autres, par exemple des planches de bois pour réaliser un collage ; d'autres modèles peuvent servir sur les chantiers de génie civil, par exemple pour faire des coffrages (maintenir des planches empêchant le mortier ou le béton de couler).pêchant le mortier ou le béton de couler).)
- Item:Ordinateur + (Un '''ordinateur''' est un [https://fr.wik … Un '''ordinateur''' est un [https://fr.wikipedia.org/wiki/Syst%C3%A8me_de_traitement_de_l%27information système de traitement de l'information] programmable tel que défini par [https://fr.wikipedia.org/wiki/Machine_de_Turing Turing] et qui fonctionne par la lecture séquentielle d'un ensemble d'instructions, organisées en [https://fr.wikipedia.org/wiki/Programme_informatique programmes], qui lui font exécuter des opérations [https://fr.wikipedia.org/wiki/Logique logiques] et [https://fr.wikipedia.org/wiki/Arithm%C3%A9tique arithmétiques]. Sa structure physique actuelle fait que toutes les opérations reposent sur la [https://fr.wikipedia.org/wiki/Logique_binaire logique binaire] et sur des nombres formés à partir de [https://fr.wikipedia.org/wiki/Chiffres_binaires chiffres binaires]. Dès sa mise sous tension, un ordinateur exécute, l'une après l'autre, des instructions qui lui font lire, manipuler, puis réécrire un ensemble de [https://fr.wikipedia.org/wiki/Donn%C3%A9e_(informatique) données] déterminées par une [https://fr.wikipedia.org/wiki/M%C3%A9moire_morte mémoire morte] d'amorçage (''Boot ROM'', [https://fr.wikipedia.org/wiki/Basic_Input_Output_System BIOS], [https://fr.wikipedia.org/wiki/Unified_Extensible_Firmware_Interface UEFI], etc.). Des tests et des sauts conditionnels permettent de passer à l'instruction suivante et donc d'agir différemment en fonction des données ou des nécessités du moment ou de l'environnement. Les [https://fr.wikipedia.org/wiki/Donn%C3%A9es données] à manipuler sont obtenues, soit par la lecture de [https://fr.wikipedia.org/wiki/M%C3%A9moire_(informatique) mémoires], soit par la lecture d'information en provenance de [https://fr.wikipedia.org/wiki/P%C3%A9riph%C3%A9rique_informatique périphériques] internes ou externes (déplacement d'une [https://fr.wikipedia.org/wiki/Souris_(informatique) souris], touche appuyée sur un [https://fr.wikipedia.org/wiki/Clavier_d%27ordinateur clavier], température, vitesse, compression…). Une fois utilisés, ou manipulés, les résultats sont écrits, soit dans des mémoires, soit dans des composants qui peuvent transformer une valeur [https://fr.wikipedia.org/wiki/Syst%C3%A8me_binaire binaire] en une action physique (écriture sur une [https://fr.wikipedia.org/wiki/Imprimante imprimante] ou sur un [https://fr.wikipedia.org/wiki/Moniteur_d%27ordinateur moniteur], accélération ou freinage d'un véhicule, changement de température d'un four…). L'ordinateur peut aussi répondre à des interruptions qui lui permettent d’exécuter des programmes de réponses spécifiques à chacune, puis de reprendre l’exécution séquentielle du programme interrompu. De 1834 à 1837, [https://fr.wikipedia.org/wiki/Charles_Babbage Charles Babbage] concoit une [https://fr.wikipedia.org/wiki/Calculatrice_m%C3%A9canique machine à calculer] programmable en associant un des descendants de la [https://fr.wikipedia.org/wiki/Pascaline Pascaline] (première machine à calculer mécanique inventée par [https://fr.wikipedia.org/wiki/Blaise_Pascal Blaise Pascal]) avec des instructions écrites sur le même type de [https://fr.wikipedia.org/wiki/Carte_perfor%C3%A9e cartes perforées] que celles inventées par [https://fr.wikipedia.org/wiki/Joseph_Marie_Jacquard Jacquard] pour ses métiers à tisser[https://fr.wikipedia.org/wiki/Ordinateur#cite_note-1 1]. C'est durant cette période qu'il imagine la plupart des caractéristiques de l'ordinateur moderne[https://fr.wikipedia.org/wiki/Ordinateur#cite_note-2 2]. Babbage passera le reste de sa vie à essayer de construire sa [https://fr.wikipedia.org/wiki/Machine_analytique machine analytique], mais sans succès. Beaucoup de personnes s’y intéressèrent et essayèrent de développer cette machine[https://fr.wikipedia.org/wiki/Ordinateur#cite_note-3 3], mais c'est cent ans plus tard, en 1937, qu'[https://fr.wikipedia.org/wiki/IBM IBM] inaugurera l'ère de l'informatique en commençant le développement de l'[https://fr.wikipedia.org/wiki/Harvard_Mark_I ASCC/Mark I], une machine basée sur l’architecture de Babbage qui, une fois réalisée, sera considérée comme l'achèvement de son rêve[https://fr.wikipedia.org/wiki/Ordinateur#cite_note-4 4]. La technique actuelle des ordinateurs date du milieu du [https://fr.wikipedia.org/wiki/Xxe_si%C3%A8cle xxe siècle]. Les ordinateurs peuvent être classés selon plusieurs critères[https://fr.wikipedia.org/wiki/Ordinateur#cite_note-5 5] tel que le domaine d'application, la taille ou l'architecture.s://fr.wikipedia.org/wiki/Ordinateur#cite_note-5 5]</sup> tel que le domaine d'application, la taille ou l'architecture.)
- Item:Rivet pop + (Un '''rivet''' est un élément d'assemblage … Un '''rivet''' est un élément d'assemblage et de fixation permanent. Il se présente sous la forme d'une tige cylindrique, généralement métallique, pleine ou creuse qui est munie à l'une de ses extrémités d'une « tête », c'est-à-dire une partie de section plus grande. L'autre extrémité sera aplatie et élargie par écrasement, pour solidariser les éléments qu'on veut riveter ensemble. C'est le '''[https://fr.wikipedia.org/wiki/Rivetage rivetage]'''. Ces éléments (par exemple deux plaques de métal) ont été percées au préalable chacune d'un trou permettant à la tige du rivet de traverser l'une et l'autre. Une vraie révolution dans le rivetage a été réalisée par l'apparition du « rivet aveugle » (ou ''rivet pop'' marque déposée) développé par la George Tucker Eyelet Company au début des années 1940 et qui ne nécessite plus ce double accès. Ce rivet est constitué d'un corps creux (tube avec collerette) en alliage déformable, et d'une tige dont une extrémité est renflée : le clou. La tête peut être ronde, fraisée ou large pour mieux répartir l'effort de serrage. Il est posé avec une [https://fr.wikipedia.org/wiki/Pince_%C3%A0_riveter pince à riveter], qui tire sur la tige dont le bout renflé pénètre dans le corps du rivet pour réaliser le rivetage. Lorsque le blocage s'effectue, la tige se casse automatiquement en laissant le rivet en place. Le clou casse en raison d'une diminution du diamètre réalisée sous sa tête lors de sa fabrication. Ce point de rupture est important car la force de serrage dépendra de la force nécessaire à la rupture du clou. Il existe des rivets aveugles dont le corps n'est pas percé de bout en bout, mais seulement d'un côté, ce qui donne un rivet étanche. En version ordinaire ce rivet est en aluminium avec tige en acier. Mais il existe aussi des rivets en [https://fr.wikipedia.org/wiki/Titane titane] pour l'aviation ou en plastique avec une faible tenue mécanique mais résistant à la corrosion. D'autres matières sont possibles pour le corps : cuivre, acier inox A2 ou A4, cupronickel… Également sont possibles des revêtements améliorant la tenue à la corrosion ou la peinture. Les rivets aveugles standards répondent à des normes [https://fr.wikipedia.org/wiki/AFNOR AFNOR] ou [https://fr.wikipedia.org/wiki/Institut_allemand_de_normalisation DIN]. Les diamètres principaux sont : 2,4 mm - 3 mm - 3,2 mm - 4 mm - 4,8 mm - 5 mm - 6 mm et 6,4 mm. Ces diamètres sont issus des systèmes métrique et anglo-saxon ce qui explique certaines proximités de taille (par ex. : 3 et 3,2 mm). La longueur du rivet dépend de l'épaisseur totale à riveter et de la taille du rivet. On utilise la formule suivante pour calculer cette longueur de rivet: Longueur = 1.1 x (épaisseur totale à riveter) + (1.5 à 2) x (diamètre du rivet) Par exemple: riveter 2 tôles de 1 mm avec un rivet de 4 mm, ce rivet aura une longueur minimum de 8,2 mm et maximum 10,2 mm. Si on ne dispose pas de rivet à la bonne longueur on prendra un rivet plus long et on ajoutera des rondelles sous le rivet pour augmenter l'épaisseur totale à riveter. == Origine == La date précise des premiers rivet n'est pas connue. A l'origine, les rivets étaient mis en place à chaud par un forgeront qui venait ensuite frapper sur les extrémités pour faire des têtes. C'est ce procédé qui a été utilisé pour la construction de la Tour Eiffel dans les années 1880. == [[http://www.wikidebrouillard.org/index.php?title=Rivet_pop&action=edit§ion=3 modifier]] Propriétés == Pour un montage permanent, le rivetage est une solution rapide et simple à mettre en oeuvre. Un rivet peut être enlevé avec un forêt en perçant la tête. == [[http://www.wikidebrouillard.org/index.php?title=Rivet_pop&action=edit§ion=4 modifier]] Expériences scientifiques avec Rivet pop == Pourquoi ne pas [http://www.wikidebrouillard.org/index.php?title=Nouvelle_page réaliser la fiche expérience] pour Wikidébrouillard ! == [[http://www.wikidebrouillard.org/index.php?title=Rivet_pop&action=edit§ion=5 modifier]] Où le trouver facilement ? == On les trouves dans tout les magasin de bricolage. les magasin de bricolage.)
- Item:Solenoide + (Un '''solénoïde''' (du [https://fr.wikiped … Un '''solénoïde''' (du [https://fr.wikipedia.org/wiki/Grec_(langue) grec] « ''solen'' », « tuyau », « conduit », et « ''eidos'' », « en forme de ») est un dispositif constitué d'un fil électrique en métal enroulé régulièrement en [https://fr.wikipedia.org/wiki/H%C3%A9lico%C3%AFde hélice] de façon à former une bobine longue. C'est pourquoi le solénoïde prend aussi le terme de [https://fr.wikipedia.org/wiki/Bobine_(%C3%A9lectricit%C3%A9) bobine]. Parcouru par un [https://fr.wikipedia.org/wiki/Courant_%C3%A9lectrique courant] alternatif ou continu, il produit un [https://fr.wikipedia.org/wiki/Champ_magn%C3%A9tique champ magnétique] dans son voisinage, et plus particulièrement à l'intérieur de l'hélice. La force du champ magnétique dépend de l'intensité du courant ainsi que de la forme du fil. C'est au cours de l'année 1820 qu'[https://fr.wikipedia.org/wiki/Andr%C3%A9-Marie_Amp%C3%A8re André-Marie Ampère] imagina le nom de solénoïde, lors d'une expérience sur les courants circulaires. Dans l’industrie, le terme solénoïde est aussi utilisé pour se référer à un [https://fr.wikipedia.org/wiki/Transducteur transducteur]. Lorsqu'il est parcouru par une énergie électrique, il va créer une force selon son axe d’enroulement. https://fr.wikipedia.org/wiki/Sol%C3%A9no%C3%AFde/fr.wikipedia.org/wiki/Sol%C3%A9no%C3%AFde)
- Item:Aquarium + (Un aquarium peut servir à élever des anima … Un aquarium peut servir à élever des animaux et cultiver des plantes pour des [https://fr.wikipedia.org/wiki/Sciences_naturelles études scientifiques] ou à élever des animaux dans un but commercial ([https://fr.wikipedia.org/wiki/Aquaculture aquaculture]), notamment pour le marché de l'[https://fr.wikipedia.org/wiki/Industrie_agroalimentaire alimentation] et de l'[https://fr.wikipedia.org/wiki/Aquariophilie aquariophilie]. Un aquarium et son contenu peut également servir d'objet de décoration et de [https://fr.wikipedia.org/wiki/Aquariophilie loisir] ou peut servir à élever des [https://fr.wikipedia.org/wiki/Esp%C3%A8ce_en_danger_de_disparition espèces en voie de disparition] ou des animaux malades. Un aquarium pourra être rempli avec de l'[https://fr.wikipedia.org/wiki/Eau_douce eau douce], de l'[https://fr.wikipedia.org/wiki/Eau_de_mer eau de mer] ou de l'[https://fr.wikipedia.org/wiki/Eau_saum%C3%A2tre eau saumâtre], cette dernière est un mélange d'eau douce et d'eau de mer qu'on peut trouver dans certains [https://fr.wikipedia.org/wiki/Estuaire estuaires] et [https://fr.wikipedia.org/wiki/Lagune lagunes]. Les animaux et les plantes qui seront placés dans l'aquarium sont fonction du type d'eau, de sa température, son [https://fr.wikipedia.org/wiki/Potentiel_hydrog%C3%A8ne pH] et sa [https://fr.wikipedia.org/wiki/Duret%C3%A9_de_l%27eau dureté] ; les animaux d'eau douce ne survivent pas dans l'eau salée, et inversement. Les espèces ''d'eau froide'' demandent une température d'eau inférieure à 15 °C alors que les espèces ''tropicales'' auront besoin d'une température supérieure ou égale à 23 °C, et les animaux vivant dans une eau douce et acide vivront difficilement dans une eau dure et basique. Outre leur utilisation industrielle et scientifique, les aquariums peuvent être placés comme objet de décoration dans les restaurants et les habitations ou peuvent être mis à disposition du public dans des [https://fr.wikipedia.org/wiki/Aquarium_public aquariums publics]. Il s'agit de muséums et zoos qui exposent des animaux dans des aquariums ; ils qui sont parfois équipés d'un [https://fr.wikipedia.org/wiki/Oceanarium oceanarium], un aquarium de grande dimension, qui élève et expose des grands animaux marins ([https://fr.wikipedia.org/wiki/Requin requins], [https://fr.wikipedia.org/wiki/Phoque phoques], [https://fr.wikipedia.org/wiki/Tortues_marines tortues marines]). Selon l'utilisation qui en est faite, un aquarium peut être rempli avec uniquement des poissons (''[https://fr.wikipedia.org/wiki/Fish_only fish only]''), il pourra être rempli avec des plantes et des animaux, voire un [https://fr.wikipedia.org/wiki/Aquarium_r%C3%A9cifal récif de corail]. Les plantes et les animaux peuvent provenir de la même région (exemple: [https://fr.wikipedia.org/wiki/Amazonie Amazonie], [https://fr.wikipedia.org/wiki/Grands_Lacs_(Afrique) grands lacs d'Afrique]) ou d'un biotope semblable : l'aquarium reproduira alors les conditions de vie dans ce milieu et propre à cet écosystème. Il peut être utilisé de manière [https://fr.wikipedia.org/wiki/Aquarium_communautaire communautaire] et héberger des animaux de différentes régions du monde, qui ne se côtoient pas dans la nature. Il peut aussi servir à faire pousser des [https://fr.wikipedia.org/wiki/Plantes_aquatiques plantes aquatiques], comme c'est le cas des [https://fr.wikipedia.org/w/index.php?title=Aquarium_hollandais&action=edit&redlink=1 aquarium hollandais] (du nom d'une discipline de jardinage popularisée aux [https://fr.wikipedia.org/wiki/Pays-Bas Pays-Bas]). Les appareils présents dans l'aquarium servent à stabiliser la température de l'eau, apporter la lumière nécessaire aux plantes et l'oxygène dissous nécessaire aux animaux. Ils servent également à éliminer les toxines qui se forment naturellement dans l'eau (voir [https://fr.wikipedia.org/wiki/Cycle_de_l%27azote#Dans_un_aquarium cycle de l'azote]).wikipedia.org/wiki/Cycle_de_l%27azote#Dans_un_aquarium cycle de l'azote]).)
- Item:Mur + (Un mur est un ouvrage destiné : * à sépare … Un mur est un ouvrage destiné : * à séparer deux pièces d'une habitation (mur de séparation, mur d'enceinte) ; * à constituer un édifice, supporter la partie supérieure par des murs porteurs en façade ou en travers de la façade (le « [https://fr.wikipedia.org/wiki/Mur_de_refend mur de refend] »), sauf pour le « [https://fr.wikipedia.org/wiki/Mur-rideau mur-rideau] » qui ne constitue que la séparation de la pièce avec la rue, qui est suspendu et ne porte rien dans certains [https://fr.wikipedia.org/wiki/Immeuble immeubles] ; * à conforter un talus ([https://fr.wikipedia.org/wiki/Mur_de_sout%C3%A8nement mur de soutènement]) ; * à protéger une zone contre les éléments ([https://fr.wikipedia.org/wiki/Digue digue], mur anti-avalanche…) ou contre le bruit ([https://fr.wikipedia.org/wiki/Mur_anti-bruit mur anti-bruit]) ; * à servir de support pour une œuvre picturale ([https://fr.wikipedia.org/wiki/Fresque fresque], [https://fr.wikipedia.org/wiki/Graffiti graffiti], etc.) ou sculpturale ([https://fr.wikipedia.org/wiki/Bas-relief bas-relief], mur végétalisé, etc.) ; * à permettre une pratique sportive (mur de [https://fr.wikipedia.org/wiki/Pelote_basque pelote basque] ou de [https://fr.wikipedia.org/wiki/Tennis tennis], [https://fr.wikipedia.org/wiki/Mur_d%27escalade mur d'escalade]).rg/wiki/Mur_d%27escalade mur d'escalade]).)
- Item:Arduino Uno + (Un super outil pour la bidouille électro-t … Un super outil pour la bidouille électro-technique !
'''Arduino''' est un circuit imprimé qualifié de libre et open-source (les plans sont consultables et tout le monde peut fabriquer une copie exacte de l'Arduino, contrairement à la plupart des objets manufacturés de notre environnement comme les machines à laver, les téléphones, les ordinateurs). Seuls le nom et le logo sont réservés.
Sur Arduino se trouve un microcontrôleur (calculateur) qui peut être programmé pour analyser et produire des signaux électriques.
En gros, on y branche des capteurs, le programme de l'Arduino traite les informations données par le capteur et déclenche des actions (comme allumer ou éteindre, augmenter, diminuer...).
Il peut être utilisé pour effectuer des tâches très diverses comme la charge de batteries, la domotique (le contrôle des appareils domestiques (éclairage, chauffage...), le pilotage d'un robot, etc.
Arduino peut être utilisé pour construire des objets interactifs indépendants (prototypage rapide), ou bien peut être connecté à un ordinateur pour communiquer avec ses logiciels.
===Plusieurs versions===
Il existe plusieurs versions de l'Arduino officiel, plus des versions réalisées par d'autres constructeurs.
Sur wikidébrouillard, nous utiliserons en général l'Arduino Uno.
==Origines==
Il était destiné à l'origine principalement mais pas exclusivement à la programmation multimédia interactive, en vue de spectacles ou d'animations artistiques.
L’histoire retiendra que c’est dans un bar d’une petite ville du nord de l’Italie qu’est né le projet Arduino.
C’est en l’honneur de ce bar où Massimo Banzi a pour habitude d’étancher sa soif que fut nommé le projet électronique Arduino (dont il est le cofondateur). Arduino est une carte microcontrôleur à bas prix qui permet — même aux novices — de faire des choses époustouflantes.
Sortie en 2005 comme un modeste outil pour les étudiants de Banzi à l’Interaction Design Institute Ivrea (IDII), Arduino a initié une révolution DIY dans l’électronique à l’échelle mondiale. Vous pouvez acheter une carte Arduino pour une vingtaine d'euros ou vous construire la vôtre à partir de rien : tous les schémas électroniques et le code source sont disponibles gratuitement sous des licences libres. Le résultat est qu’Arduino est devenu le projet le plus influent de son époque dans le monde du matériel libre.
[http://www.framablog.org/index.php/post/2011/12/10/arduino-histoire Lire tout l'article source en CC-By-Sa sur Framablog]
==Comment l'utiliser ?==
*Il faut télécharger le [[Item:Logiciel Arduino|logiciel]] de programmation [http://www.arduino.cc/fr/ sur le site Arduino].
*L'installer sur son ordinateur (le logiciel est compatible Linux, Mac OSX et Windows).
Et vous pouvez commencer par tester, dans les exemples de programmes, le programme "Blink" qui fera clignoter la LED de l'Arduino qui est branchée sur la pin 13. Vous pouvez aussi tester le tutoriel [[Blinker une LED]].
On peut donner des "pouvoirs" supplémentaires à l'arduino grâce à des circuits imprimés qu'on branche dessus : les shields.
Il en existe de différentes sorte :
*ethernet : pour connecter votre arduino au réseau via un câble RJ45,
*Bluetooth
*Zigbee : pour communiquer par ondes radio
*Wifi
*Pilotage de moteurs
*Ecran LCD
*shield Breadboard : pour faire les montages directement sur l'arduino !
*...
==Qu'est-ce que c'est exactement ?==
===Un micro-contrôleur===
C'est un circuit intégré qui traite les informations qu'il reçoit et déclenche des actions suivant le programme qu'il a reçu.
===Interface USB/série===
L'Arduino se connecte à un ordinateur par un câble USB. C'est par ce câble qu'on va installer le programme. C'est également par ce câble que l'Arduino peut renvoyer des informations à l'ordinateur. Lorsque l'Arduino est connecté en USB, c'est l'USB qui assure l'alimentation électrique de l'Arduino.
Pour l'ordinateur, la carte Arduino est comme un simple périphérique (il faut donc installer les pilotes !).
===Des entrées et des sorties===
Il y a 20 entrées/sorties sur l'Arduino.
*6 analogiques, numérotées de A0 à A5.
*14 numériques, numérotées de 0 à 13. 6 de ces entrées/sorties peuvent assurer une sortie PWM (Pulse Width Modulation - Modulation de Largeur d'Impulsion, une astuce pour modifier le courant de sortie). Les 6 PMW sont les numéros 3, 5, 6, 9, 10, 11.
====Les entrées analogiques====
Elles peuvent recevoir une tension variable (entre 0 et 5 volts) en provenance de capteurs analogiques (résistance variable par exemple).
====Les entrées/sorties numériques====
Elles reçoivent ou envoient des signaux numériques (donc 0 ou 1). ces signaux se traduisent par 0V ou 5V.
Le fonctionnement (entrée ou sortie) est fixé dans le programme (INPUT, OUTPUT).
====='''Entrées numériques : attention au smog électromagnétique'''=====
Lorsque qu'une entrée numérique n'est connectée à rien, elle reçoit un signal dû à l'électricité statique ou l'ambiance électromagnétique. On parle alors de potentiel flottant.
On peut fixer le potentiel grâce à un système de résistance dite de pull-up (tension max, soit 5V) ou pull down (tension min ou 0V). On utilise une résistance de 10kOhms connectée de l'entrée au +5V (pull-up), ou alors à la masse (GND, 0V, le pull-down).
Toutes les broches numériques de l'Arduino possèdent des résistances de pull-up, elles s'activent dans le code, au niveau du setup, par l'instruction pinMode(NumeroDeLaBroche, INPUT_PULLUP);
====='''Sorties numériques'''=====
Leur puissance est limitée à 40 mA par broche pour un total de 200mA consommé. Si on a besoin de consommer plus de puissance électrique, alors il faudra utiliser un circuit supplémentaire (une autre carte, pilotée par l'Arduino qui servira à fournir le courant nécessaire. ça peut être un shield). Dans ce cas on parle de circuit de commande (l'arduino), et de circuit de puissance (le shield). Il est important que les masses (GND) soient connectées.
La puce ATmega n'est pas capable de sortir des tensions variables mais grâce au signal PMW on peut fournir une tension variable artificielle. Le signal PMW consiste à faire "clignoter" le courant :
*Quand le courant sort à 5V en continue, la broche sort du 5V.
*Imaginez maintenant que la broche délivre très rapidement un clignotement entre 0V et 5V (la broche délivre soit 0V, soit 5V). Si elle délivre pour moitié du temps du 5V, elle imitera du 2,5V. Si elle donne 5V 20% du temps ce sera 1V, etc....
==Les limites de l'arduino==
===Avec quoi alimenter mon arduino ?===
*Par le port USB : 5V
*Par une alimentation externe :
**Une fiche jack 2.1 mm mâle.
**Une alimentation DC stabilisée entre 7~12 volts DC.
**Le centre positif + <-----o )------> -
l'arduino peut accepter entre 6, minimum et 20 Volts grand maximum.
Intensité maximale disponible par broche entrée/sortie 5V : 40 mA (avec un total de 200 mA)
Intensité maximale disponible pour la sortie 3,3V : 50 mA
Intensité maximale disponible pour la sortie 5V : 500 mA en cas d'alimentation par le port USB seul, sinon en fonction de l'alimentation utilisée.
*Mémoire Programme Flash : 32 KB (ATmega328) dont 0.5 KB sont utilisés par le bootloader
*Mémoire SRAM (mémoire volatile) : 2 KB (ATmega328)
*Mémoire EEPROM (mémoire non volatile) : 1 KB (ATmega328)
*Vitesse d'horloge : 16 MHz
[http://www.mon-club-elec.fr/pmwiki_reference_arduino/pmwiki.php?n=Main.MaterielUno Source : Mon club Elec licence CC-By-Sa]
==Ressources==
===Sur d'autres sites===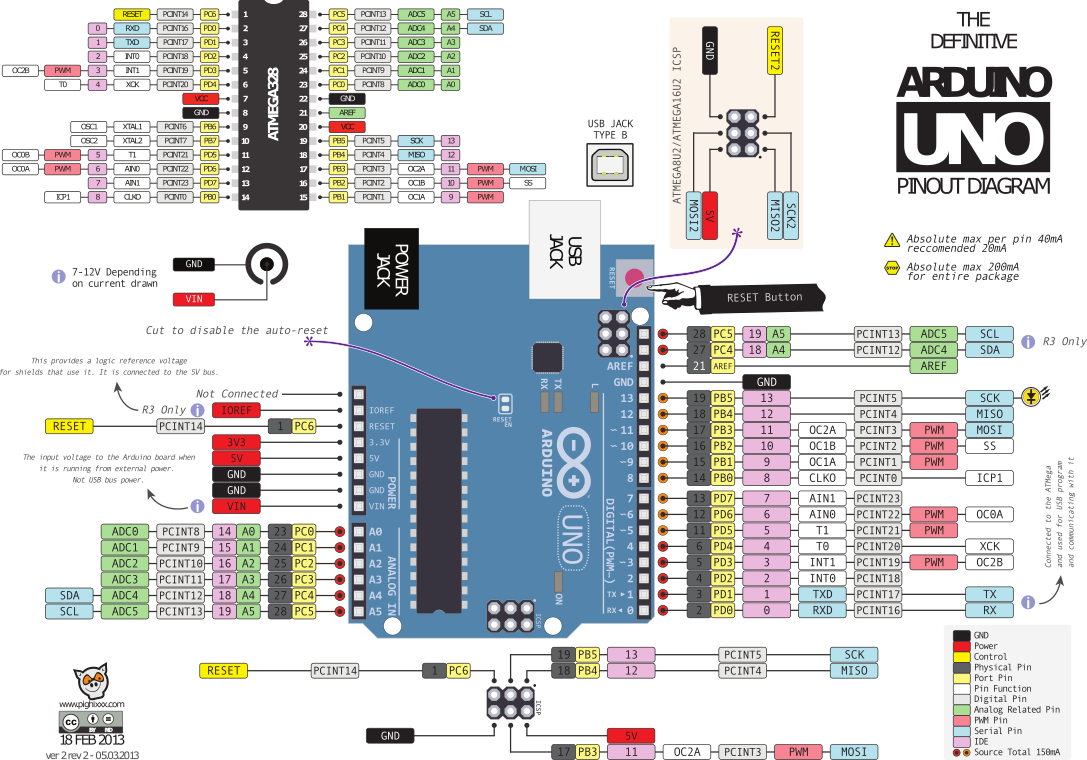
*Sources et plus de détails : [http://fr.wikipedia.org/wiki/Arduino arduino sur Wikipédia]
*[http://www.arduino.cc/fr/ Le site Officiel Arduino en Français]
*D' [http://arduino.cc/forum/index.php/topic,67634.0.html autres tutoriels pour débuter]
*[http://www.mon-club-elec.fr/pmwiki_reference_arduino/pmwiki.php Un autre site de référence de l'Arduino en Français]) - Item:Capteur de pression + (Une '''sonde de pression''' (ou ''[https:/ … Une '''sonde de pression''' (ou ''[https://fr.wikipedia.org/wiki/Capteur capteur] de pression'') est un dispositif destiné à convertir les variations de [https://fr.wikipedia.org/wiki/Pression pression] en variations de [https://fr.wikipedia.org/wiki/Tension_%C3%A9lectrique tension électrique]. Lorsque la [https://fr.wikipedia.org/wiki/Sonde sonde] est reliée à un [https://fr.wikipedia.org/wiki/Ordinateur système numérique], les variations [https://fr.wikipedia.org/wiki/Analogique analogiques] sont d'abord converties en signaux [https://fr.wikipedia.org/wiki/Num%C3%A9rique numériques] [https://fr.wikipedia.org/wiki/Syst%C3%A8me_binaire binaires] par un [https://fr.wikipedia.org/wiki/Convertisseur_analogique-num%C3%A9rique convertisseur analogique-numérique] avant d'être transmises à l'ordinateur de contrôle et de gestion. L'unité de pression fournie par la sonde peut être exprimée en différentes unités, telle que [https://fr.wikipedia.org/wiki/Bar_(unit%C3%A9) bar], [https://fr.wikipedia.org/wiki/Pascal_(unit%C3%A9) pascal], etc.org/wiki/Pascal_(unit%C3%A9) pascal], etc.)
- Item:Vanne de tuyauterie + (Une '''vanne''' est un dispositif destiné … Une '''vanne''' est un dispositif destiné à contrôler (stopper ou modifier) le [https://fr.wikipedia.org/wiki/D%C3%A9bit_(physique) débit] d'un [https://fr.wikipedia.org/wiki/Fluide_(mati%C3%A8re) fluide] [https://fr.wikipedia.org/wiki/Liquide liquide], [https://fr.wikipedia.org/wiki/Gaz gazeux], [https://fr.wikipedia.org/wiki/Poudre pulvérulent] ou [https://fr.wikipedia.org/wiki/Phase_(thermodynamique) multiphasique], en milieu libre ([https://fr.wikipedia.org/wiki/Canal_(voie_d%27eau) canal]) ou en milieu fermé ([https://fr.wikipedia.org/wiki/Canalisation canalisation])pedia.org/wiki/Canalisation canalisation]))
- Item:Vis + (Une '''vis de fixation''', appelée communé … Une '''vis de fixation''', appelée communément '''vis''', est un organe mécanique, comportant une [https://fr.wikipedia.org/wiki/Tige_filet%C3%A9e tige filetée] et une tête ; il est destiné à réaliser la fixation d'une ou de plusieurs pièces par pression. La fixation par vis crée une [https://fr.wikipedia.org/wiki/Liaison_(m%C3%A9canique) liaison] plan sur plan démontable, par placage précontraint des deux pièces à assembler. Tant que les efforts de traction appliqués sur la liaison n'excèdent pas la [https://fr.wikipedia.org/wiki/Tension_m%C3%A9canique tension] exercée au repos par les vis (dite « prétension »), l'assemblage bénéficie de la raideur des pièces assemblées. Les premières apparitions connues d'un organe mécanique utilisant une surface hélicoïdale remontent à la [https://fr.wikipedia.org/wiki/Vis_d%27Archim%C3%A8de vis d'Archimède], (mais il s'agit d'une utilisation dynamique de type « hélice »). Il fallut attendre la [https://fr.wikipedia.org/wiki/Renaissance_(p%C3%A9riode_historique) Renaissance] pour voir des vis comme « moyen de fixation », dans les [https://fr.wikipedia.org/wiki/Horloge horloges], les machines de guerre et d'autres constructions mécaniques. [https://fr.wikipedia.org/wiki/L%C3%A9onard_de_Vinci Léonard de Vinci] développa alors des méthodes pour leur usinage. Toutefois, elles continueront à être fabriquées à la main et sans [https://fr.wikipedia.org/wiki/Normalisation_(industrie_et_service) normalisation], même après le début de la [https://fr.wikipedia.org/wiki/R%C3%A9volution_industrielle Révolution industrielle]. Les vis sont fabriquées industriellement depuis le [https://fr.wikipedia.org/wiki/XIXe_si%C3%A8cle XIXe siècle]. Les vis fabriquées au XIXe siècle étaient à tête fendue. Au début du [https://fr.wikipedia.org/wiki/XXe_si%C3%A8cle XXe siècle], pour éviter que le [https://fr.wikipedia.org/wiki/Tournevis tournevis] ne glisse sur la tête de la vis, le [https://fr.wikipedia.org/wiki/Canada Canadien] Peter L. Robertson inventa la vis à tête carrée. Au même moment, un [https://fr.wikipedia.org/wiki/%C3%89tats-Unis Américain] inventa la vis à tête étoilée pour résoudre le même problème. La vis à tête carrée est très populaire au Canada alors que la vis à tête étoilée est très populaire ailleurs dans le monde. Cependant, aucun type de vis n'a su s'imposer complètement et on retrouve tous les types de vis dans tous les [https://fr.wikipedia.org/wiki/Pays pays]. == Caractéristiques == Vis à bois : a : tête de vis ; b : fût ; c : partie filetée ; d : pointe. Les vis de fixation sont constituées des parties suivantes : * une tête de vis, reprenant le couple exercé par l'outil de serrage et appliquant un effort de plaquage sur la bride supérieure ; * éventuellement le fût, partie cylindrique lisse pouvant prendre appui sur l'[https://fr.wikipedia.org/wiki/Al%C3%A9sage alésage] des brides ; il permet de reprendre le [https://fr.wikipedia.org/wiki/Cisaillement cisaillement] en l’absence de [https://fr.wikipedia.org/wiki/Pion_(m%C3%A9canique) pion] de centrage ; * la partie filetée, assurant la mise en tension de la liaison par vissage (transformation d'une partie du couple de serrage en prétension par le filet [https://fr.wikipedia.org/wiki/H%C3%A9lice_(g%C3%A9om%C3%A9trie) hélicoïdal]) ; * éventuellement la pointe, assurant le guidage de la vis, voire le [https://fr.wikipedia.org/wiki/Per%C3%A7age perçage] du [https://fr.wikipedia.org/wiki/Substrat substrat]. Les vis de fixation sont habituellement fabriquées à base d'[https://fr.wikipedia.org/wiki/Acier acier]. Lorsqu'une grande résistance au temps ou à la [https://fr.wikipedia.org/wiki/Corrosion corrosion] est requise, comme pour les petites vis de fixation ou implants médicaux, des matériaux tels que l'[https://fr.wikipedia.org/wiki/Acier_inoxydable acier inoxydable], le [https://fr.wikipedia.org/wiki/Laiton laiton], le [https://fr.wikipedia.org/wiki/Titane titane], et le [https://fr.wikipedia.org/wiki/Bronze bronze] peuvent être utilisés.//fr.wikipedia.org/wiki/Titane titane], et le [https://fr.wikipedia.org/wiki/Bronze bronze] peuvent être utilisés.)
- Item:Diode electro luminescente + (Une diode électroluminescente ne laisse pa … Une diode électroluminescente ne laisse passer le courant électrique que dans un seul sens (le sens passant, comme une diode classique, l'inverse étant le sens bloquant) et produit une lumière d'une ou plusieurs couleurs à partir de l'électricité qui la traverse. Elle compte plusieurs dérivées, principalement, l'OLED, l'AMOLED ou le FOLED (pour flexible oled). En raison de leur rendement lumineux, les LED pourraient devenir la prinbcipale technique d'éclairage (ampoules, feux des voitures, lampadaires,...). Elles sont aussi utilisées dans la construction des écrans plats de télévision : pour le rétroéclairage des écrans à cristaux liquides ou comme source d'illumination principale dans les télévisions à OLED. Les premières LED à être commercialisées ont produit de la lumière infrarouge, rouge, verte puis jaune. L'arrivée de la LED bleue, associée aux progrès techniques et d'assemblage permet de couvrir la bande des longueurs d'onde d'émission s’étendant de l'ultraviolet (350 nm) à l’infrarouge (2 000 nm), ce qui répond à de nombreux besoins. De nombreux appareils sont munis de LED composites (trois LED réunies en un composant : rouge, vert et bleu), ce sont des LED dites RGB (Red, Green, blue).sont des LED dites RGB (Red, Green, blue).)
- Item:Fenètre + (Une fenêtre assure plusieurs fonctions pou … Une fenêtre assure plusieurs fonctions pour le local concerné : l'éclairage, la vue intérieur-extérieur ou vers l'extérieur seul, l'aération, auxquels s'ajoutent parfois la communication verbale et la sécurité des évacuations. Tout ceci est fait en respectant la séparation des lieux par leur isolation thermique et phonique selon le besoin. La fenêtre a servi autrefois à faire entrer et sortir en façade sur rue des marchandises dans des magasins situés en étage. Elle a servi à évacuer des ordures ménagères, aussi bien à la ville qu'à la campagne et cet usage a disparu avec son interdiction dans les règlements royaux puis municipaux. Actuellement aux fonctions de la fenêtre s'est ajoutée une fonction obligatoire de sécurité incendie qui concerne en haut des escaliers les dômes prévus pour l'évacuation des fumées d'incendie et une fonction incitative donnée par le retour financier de la fiscalité pour la maîtrise de la chaleur entrant dans le bâtiment par l'ensoleillement.ant dans le bâtiment par l'ensoleillement.)
- Item:Liquide vaisselle + (Une solution détergente qui sert à laver l … Une solution détergente qui sert à laver la vaisselle. '''Pourquoi utilisons-nous du produit vaisselle ?''' L'eau tend à glisser et à former des gouttelettes sur la vaisselle sale. Ceci est dû à la [http://www.wikidebrouillard.org/index.php?title=Tension_superficielle tension superficielle] de l'eau et à la présence de graisse sur la vaisselle. Comment permettre à l'eau de mouiller davantage la vaisselle ? C'est simple : en brisant la tension superficielle avec de l'eau chaude ou du produit vaisselle. L'eau et le liquide vaisselle peuvent alors déloger la saleté et les graisses.t alors déloger la saleté et les graisses.)
- Item:Troisième main + (Une troisième main est souvent composée de … Une troisième main est souvent composée de pinces crocodiles orientables (sur la photo, les mâchoires sont recouverte de gaine thermo-rétrécissante pour ne pas endommager les composants) et souvent d'une loupe. Lorsqu'on veut régler la longueur des câbles des freins à mâchoires ou de type Cantilever, il est utile d'avoir quelqu'un pour nous tenir les patins bien plaqués contre la jante. Si vous n'avez personne sous la main, ou que cette personne souhaite faire quelque chose de plus cérébrale que de maintenir vos patins pendant 10 mn, ce qui ce comprend, l'outil "3ème main" est très pratique. Il en existe de plusieurs type : à vis, à ressort (rapide à mettre mais ne tient pas forcément bien) et élastique (le modèle Parktool est à la fois rapide et stable). Parktool est à la fois rapide et stable).)
- Item:Toiture végétale + ([http://fr.wikipedia.org/wiki/Toiture Le t … [http://fr.wikipedia.org/wiki/Toiture Le toit sur wikipedia] == [[http://www.wikidebrouillard.org/index.php?title=Toiture_v%C3%A9g%C3%A9tale&action=edit§ion=2 modifier]] Origine == Le principe de la toiture végétale existe depuis la Préhistoire. Sa construction se fait de manière traditionnelle dans plusieurs pays scandinaves et européens. == [[http://www.wikidebrouillard.org/index.php?title=Toiture_v%C3%A9g%C3%A9tale&action=edit§ion=3 modifier]] Composition chimique == Un toit recouvert d’un substrat végétalisé (un épais mélange de terre et des végétaux herbacés enracinés). == [[http://www.wikidebrouillard.org/index.php?title=Toiture_v%C3%A9g%C3%A9tale&action=edit§ion=4 modifier]] Propriétés == La toiture végétale a des propriétés de protection et restauration de la biodiversité et de l’environnement dans le milieu urbain, comme : • Une diminution des taux de CO et CO2, pour plus de dioxygène produit. • Des effets bénéfiques sur le climat, les microclimats et sur la santé et le bien-être des habitants. • De nombreux effets bénéfiques sur la biodiversité. La vie sauvage retrouve des habitats, des équilibres naturels se recréent. Sur les terrasses extensivement végétalisées, les plantes les plus adaptées sont les plantes de milieux secs et oligotrophes qui sont justement menacées de disparition à cause de l’eutrophisation générale des milieux. Les cortèges faunistiques associés trouvent ainsi des îlots où leur survie est possible. • Un impact très positif sur l’eau avec une filtration et une épuration biologique des eaux de pluies par complexation, par exemple, des métaux lourds dans le substrat. == [[http://www.wikidebrouillard.org/index.php?title=Toiture_v%C3%A9g%C3%A9tale&action=edit§ion=5 modifier]] Expériences scientifiques avec Toiture végétale == Pourquoi ne pas [http://www.wikidebrouillard.org/index.php?title=Nouvelle_page réaliser la fiche expérience] pour Wikidébrouillard ! == [[http://www.wikidebrouillard.org/index.php?title=Toiture_v%C3%A9g%C3%A9tale&action=edit§ion=6 modifier]] Où le trouver facilement ? == == [[http://www.wikidebrouillard.org/index.php?title=Toiture_v%C3%A9g%C3%A9tale&action=edit§ion=7 modifier]] Utilisations dans la vie quotidienne == == [[http://www.wikidebrouillard.org/index.php?title=Toiture_v%C3%A9g%C3%A9tale&action=edit§ion=8 modifier]] Plus d'informations sur Toiture végétale == '''Impact paysager''' Judicieusement conçues, les toitures végétalisées redonnent aux villes, notamment industrielles, une indéniable valeur esthétique et valorisent l’habitat en offrant une bonne solution pour que le bâtiment s’intègre dans son environnement. '''Impact sur la santé''' Amélioration de la qualité de l’air (hygrométrie, poussières, toxiques). La végétation supplémentaire apportée par les toits végétaux crée un apport de dioxygène dans les villes tout en filtrant bon nombre de polluants atmosphériques tels le dioxyde de soufre ou l'oxyde d'azote. De plus, les végétaux retiennent la poussière et réduisent la quantité de particules en suspension dans l'air. '''Impact social''' Les toitures végétalisées contribuent à rendre la ville plus « calme », moins stressante. Les habitants retrouvent une certaine harmonie urbanisme-nature. '''Inconvénients''' Ces terrasses nécessitent une bonne étanchéité et sont mal adaptées aux toits à forte pente. Les terrasses extensives peuvent convenir presque partout, mais une végétation arborée nécessite une charpente ou une dalle surdimensionnée, selon le type d'arbre et le poids de terre que l'on voudra y disposer. Dans ce dernier cas un système d'arrosage peut être nécessaire en période sèche et chaude.sposer. Dans ce dernier cas un système d'arrosage peut être nécessaire en période sèche et chaude.)
- Item:Elastique + (https://fr.wikipedia.org/wiki/%C3%89lastiq … https://fr.wikipedia.org/wiki/%C3%89lastique == Utilisation == Les élastiques sont utilisés : * dans la fabrication des vêtements * en coiffure, pour tenir les cheveux * en papeterie, pour grouper des enveloppes, maintenir ensemble des petits objets, fermer une boite * en bricolage, pour assembler plusieurs pièces, pour faire des prototypes rapidement sans clou, ni colle, ni vis * en cuisine, pour refermer des sachets, des boîtes, ou ficeler la viande * en modélisme, pour la propulsion de petits avions et de petits bateaux * en horticulture, pour soutenir des tiges qui vont supporter le poids de fruits lourds, sans abimer les tiges * pour la pêche à la ligne, afin d'éviter trop d'efforts sur la canne à pêche * par les facteurs pour regrouper des lettres (d'ailleurs les facteurs anglais ont des élastiques rouges pour les retrouver plus facilement s'ils tombent) * pour faire des bracelets, dans le cas des looms, des petits élastiques circulaires. == Caractéristiques == * Une bande élastique est appelée un « bracelet élastique ». * La longueur d'un bracelet élastique correspond à la moitié de sa circonférence. Il s'agit de sa longueur au repos. * Les élastiques basiques qui ont une couleur jaune ou caramel, sont dits « élastiques blonds ». * Les bracelets élastiques sont parfois vendus au poids (sac de 30 grammes, sac de 100 grammes) au lieu d'être vendu selon leur quantité. Un bracelet élastique typique de 30x1 millimètres pèse 0,2 gramme ; de 75 x 5 millimètres pèse 1,2 gramme. * La chaleur provoque une rétractation de l'élastique, alors que la fraicheur provoque une extension[https://fr.wikipedia.org/wiki/%C3%89lastique#cite_note-1 1]. C'est le contraire de ce qui se passe pour les métaux. * La manipulation des élastiques peut irriter la peau des doigts. Cela peut être dû à la présence possible de produits chimiques destinés à assouplir les élastiques. * Il est possible de fabriquer des élastiques en découpant des chambres à air de vélo, puisqu'elles sont aussi en caoutchouc. C'est un moyen de recyclage des chambres à air trouées.'est un moyen de recyclage des chambres à air trouées.)
- Item:Ruban adhésif + (https://fr.wikipedia.org/wiki/Ruban_adh%C3 … https://fr.wikipedia.org/wiki/Ruban_adh%C3%A9sif == Description == On l'appelle communément du scotche quand on parle avec l'accent marseillais parce qu'on l'écrit en fait "scotch" ce qui est une marque déposée de de la société 3M. Il s'agit d'une bande de plastique (ou de [http://www.wikidebrouillard.org/index.php?title=Papier papier]) recouverte sur l'une des face de colle (parfois sur les deux faces). == [[http://www.wikidebrouillard.org/index.php?title=Ruban_adh%C3%A9sif&action=edit§ion=2 modifier]] Origine == Inventé par Richard Drew en 1925, le ''ruban masquant adhésif'', baptisé '''Scotch Tape''', n'avait pas pour utilité de garder soudés deux objets distincts. L'invention du ruban adhésif opaque tient à la volonté d'éviter aux peintres automobiles de déborder lors de leurs travaux. L'ingénieur modela son invention en 1930 pour lui donner son usage actuel, selon [http://www.linternaute.com/savoir/magazine/dossier/les-inventions-qui-ont-change-le-xxe-siecle/le-ruban-adhesif.shtml la fiche du ruban adhésif, sur ''linternaute.com''] == [[http://www.wikidebrouillard.org/index.php?title=Ruban_adh%C3%A9sif&action=edit§ion=3 modifier]] Composition chimique == == [[http://www.wikidebrouillard.org/index.php?title=Ruban_adh%C3%A9sif&action=edit§ion=4 modifier]] Propriétés == == [[http://www.wikidebrouillard.org/index.php?title=Ruban_adh%C3%A9sif&action=edit§ion=5 modifier]] Expériences qui utilisent ce matériel == Indiquer le '''concept scientifique''' associé à chacune des expériences. === [[http://www.wikidebrouillard.org/index.php?title=Ruban_adh%C3%A9sif&action=edit§ion=6 modifier]] Sur le Wikidébrouillard === * [http://www.wikidebrouillard.org/index.php?title=L%27anneau_de_Moebius L'anneau de Moebius] * [http://www.wikidebrouillard.org/index.php?title=Le_vinaigre_et_l%27eau_sont-ils_conducteurs%3F Le vinaigre et l'eau sont-ils conducteurs?] * [http://www.wikidebrouillard.org/index.php?title=Faire_bouger_avec_de_l%E2%80%99%C3%A9lectricit%C3%A9 Faire bouger avec de l’électricité] * [http://www.wikidebrouillard.org/index.php?title=Un_fil_%C3%A9lectrique_qui_se_transforme_en_pile. Un fil électrique qui se transforme en pile.] * [http://www.wikidebrouillard.org/index.php?title=Le_lance_patate_explosif Le lance patate explosif] * [http://www.wikidebrouillard.org/index.php?title=Ludion Ludion] * [http://www.wikidebrouillard.org/index.php?title=D%C3%A9tecteur_de_particules Détecteur de particules] * [http://www.wikidebrouillard.org/index.php?title=Eolienne Eolienne] * [http://www.wikidebrouillard.org/index.php?title=Le_g%C3%A9nie_sort_de_la_bouteille Le génie sort de la bouteille] * [http://www.wikidebrouillard.org/index.php?title=Tornade_en_bouteille Tornade en bouteille] * [http://www.wikidebrouillard.org/index.php?title=Un_ballon_%C3%A0_r%C3%A9action Un ballon à réaction] * [http://www.wikidebrouillard.org/index.php?title=Klaxon_Tch%C3%A8que Klaxon Tchèque] * [http://www.wikidebrouillard.org/index.php?title=Les_Ballasts_d%27un_sous-marin Les Ballasts d'un sous-marin] * [http://www.wikidebrouillard.org/index.php?title=Une_voiture_propuls%C3%A9e_par_un_ballon Une voiture propulsée par un ballon] * [http://www.wikidebrouillard.org/index.php?title=Chromatographie Chromatographie] * [http://www.wikidebrouillard.org/index.php?title=Airbag_pour_oeuf Airbag pour oeuf] * [http://www.wikidebrouillard.org/index.php?title=Papier_:_sa_force_cach%C3%A9e_! Papier : sa force cachée !] * [http://www.wikidebrouillard.org/index.php?title=Ballasts Ballasts] * [http://www.wikidebrouillard.org/index.php?title=Moteur_%C3%A9lectrique_simple Moteur électrique simple] * [http://www.wikidebrouillard.org/index.php?title=Souffle_aspirant Souffle aspirant] * [http://www.wikidebrouillard.org/index.php?title=Barrage Barrage]ffle aspirant] * [http://www.wikidebrouillard.org/index.php?title=Barrage Barrage])
- Item:Chronometre + (À l'origine, les chronomètres étaient dest … À l'origine, les chronomètres étaient destinés à être utilisés sur des bateaux pour déterminer la longitude selon les principes de la navigation céleste. Pour cela, il fallait mesurer la différence d'heure de culmination du soleil par rapport à celle de la dernière position connue. À l'époque, les premières horloges précises fonctionnaient à l'aide d'un pendule, mais étaient continuellement déréglées par le roulis du navire en mer. John Harrison, un charpentier-horloger anglais, fut le premier à résoudre ce problème, en développant une horloge avec une paire de pendules oscillants en sens contraire, connectés par des ressorts. Il remporta ainsi le prix de l'Amirauté britannique. == [[http://www.wikidebrouillard.org/index.php?title=Chronom%C3%A8tre&action=edit§ion=3 modifier]] Propriétés == On peut classer les chronomètres en deux catégories: * Les chronomètres mécaniques, fonctionnant avec de nombreuses pièces mécaniques comme des ressorts ou des engrenages. * Les chronomètres électroniques (ou numériques), fonctionnant avec des circuits électroniques utilisant des quartz. == [[http://www.wikidebrouillard.org/index.php?title=Chronom%C3%A8tre&action=edit§ion=4 modifier]] Expériences scientifiques avec Chronomètre == * [http://www.wikidebrouillard.org/index.php?title=Ton_temps_de_r%C3%A9action_est-il_plus_rapide_que_celui_de_ton_adversaire%3F Ton_temps_de_réaction_est-il_plus_rapide_que_celui_de_ton_adversaire?] * [http://www.wikidebrouillard.org/index.php?title=Laine_comme_isolant Laine_comme_isolant] * [http://www.wikidebrouillard.org/index.php?title=Noir_ou_blanc_%3F Noir_ou_blanc_?] == [[http://www.wikidebrouillard.org/index.php?title=Chronom%C3%A8tre&action=edit§ion=5 modifier]] Où le trouver facilement ? == * Chez les horlogers. * Où l'on peut acheter des montres. * Souvent dans les structures où l'on pratique du sports. * La plupart des montres numériques ont aujourd'hui une fonction chronomètre. * De nombreux téléphones portable ont une fonction chronomètre. * Un programme spécifique sur un ordinateur peut servir de chronomètre. * Etc... == [[http://www.wikidebrouillard.org/index.php?title=Chronom%C3%A8tre&action=edit§ion=6 modifier]] Utilisations dans la vie quotidienne == Les chronomètres sont très utilisés dans le milieu sportif ; que ce soit pour mesurer les durées de jeu souvent dans les sports collectif, ou pour déterminer avec grandes précisions les temps dans les sports de rapidité. déterminer avec grandes précisions les temps dans les sports de rapidité.)












