Le Tableau de bord Débrouillarduino est un outils permettant d'initier la programmation auprès de très jeunes publics (à partir de 3 ans), sous forme ludique, par programmation tangible.


Difficulté
Expert
Durée
3 jour(s)
Disciplines scientifiques
Arduino, Informatique
Introduction
Le Tableau de bord Débrouillarduino est un outils permettant d'initier la programmation auprès de très jeunes publics (à partir de 3 ans), sous forme ludique, par programmation tangible.
Le projet part des questions : Y-a-t-il un âge pour commencer à programmer ? Pour piloter son premier robot ?
Le robot Débrouillarduino propose une solution à ces questions grâce à son tableau de bord permettant de programmer un robot, y compris sans savoir lire à l'aide de blocs de directions reconnus et interprétés.Youtube
- Matériel et outils
Arduino 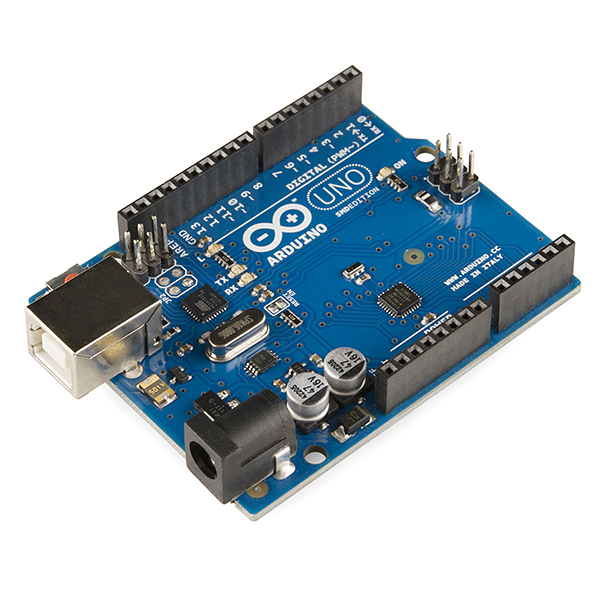

Arduino, et son synonyme Genuino sont des micro-controleurs libres.
Câble USB - micro-USB 

Le terme anglais Universal Serial Bus ou USB (en français bus universel en série) est une norme relative à un bus informatique en série qui sert à connecter des périphériques informatiques à un ordinateur ou à tout type d'appareil prévu à cet effet (tablette, smartphone, etc.).
D1 mini 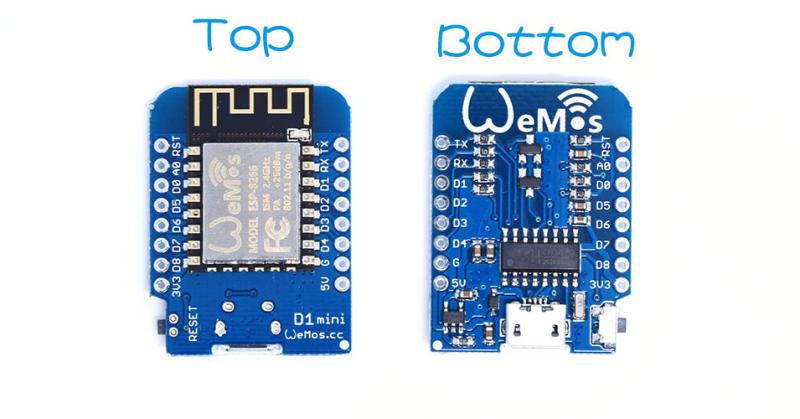

C'est un cousin de l'Arduino, avec du wifi !
Fer à souder 

Un fer à souder, ou plus précisément un fer à braser, est un outil chauffant permettant de réaliser une opération de brasage. L'usage courant du fer à souder se fait dans le domaine du montage de composants électroniques.
Imprimante 3D 

L'impression 3D ou fabrication additive regroupe les procédés de fabrication permettant de créer des pièces en volume par ajout de matière en couches successives.
Logiciel Arduino 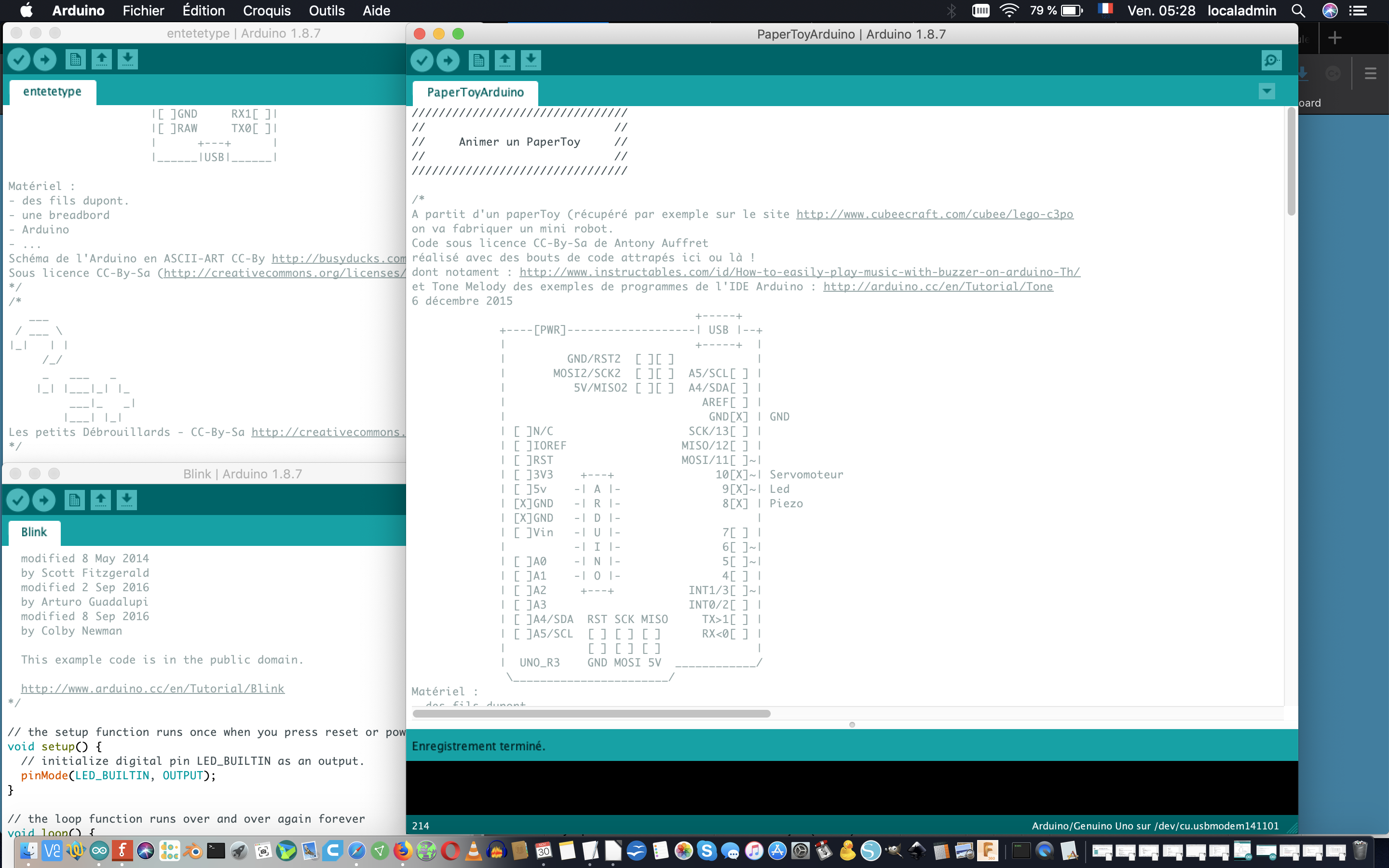

C'est le logiciel libre développé pour accompagner et programmer la carte Arduino
Pile 4,5V 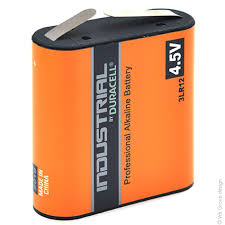

Grande pile plate et carrée 4,5 Volts. Elle comporte 2 lamelles (bornes + et -). Très pratique pour les expériences autour de l'électricité !
Pince à dénuder 

Pince pour dénuder les bouts des fils électriques
Servomoteur 

Un servomoteur (couramment appelé "servo" du latin "servus" signifiant "esclave") est un moteur capable de maintenir une opposition à un effort statique et dont la position est vérifiée en continu et corrigée en fonction de la mesure.
Câble Dupont 

Les câbles de connexion servent à créer rapidement des liaisons électriques sur des platines de prototypage sans avoir besoin de faire des soudures.
Étape 1 -
Dernière modification 12/12/2020 par user:Antonydbzh.
Draft