Et si vous en pinciez pour la carte arduino ? Une fois greffé sur un manche, on pourra attraper, grâce à des servomoteurs, différent objets en tournant les potentiomètres !

Difficulté
Technique
Durée
1 heure(s)
Disciplines scientifiques
Arduino, Informatique
- Matériel et outils
Logiciel Arduino 

C'est le logiciel libre développé pour accompagner et programmer la carte Arduino
Ordinateur 

Dès sa mise sous tension, un ordinateur exécute, l'une après l'autre, des instructions qui lui font lire, manipuler, puis réécrire un ensemble de données auquel il a accès. Des tests et des sauts conditionnels permettent de changer d'instruction suivante, et donc d'agir différemment en fonction des données ou des nécessités du moment. Les données à manipuler sont obtenues, soit par la lecture de mémoires, soit par la lecture de composants d'interface (périphériques) qui représentent des données physiques extérieures en valeurs binaires (déplacement d'une souris, touche appuyée sur un clavier, température, vitesse, compression...). Une fois utilisées, ou manipulées, les données sont réécrites, soit dans des mémoires, soit dans des composants qui peuvent transformer une valeur binaire en une action physique (écriture sur une imprimante ou sur un moniteur, accélération ou freinage d'un véhicule, changement de température d'un four ...). L'ordinateur peut aussi répondre à des interruptions qui lui permettent d’exécuter des programmes de réponses spécifiques à chacune, puis de reprendre l’exécution séquentielle du programme interrompu. La technique actuelle des ordinateurs date du milieu du xxe siècle. Ils peuvent être classés selon plusieurs critères1 (domaine d'application, taille ou architecture).
Colle 

Colle
Breadboard 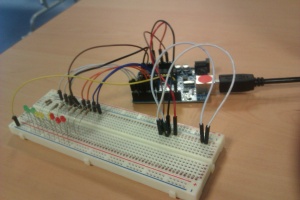

L'avantage de ce système est d'être totalement réutilisable, car il ne nécessite pas de soudure. Ce dernier point distingue les platines Labdec des stripboards (ou veroboards), des perfboards ou des circuits imprimés qui sont, eux, utilisés pour réaliser des prototypes permanents et que l'on sera donc moins à même de démonter. On peut de plus câbler sur une platine Labdec une grande variété de composants afin de réaliser des circuits électroniques, du plus simple circuit jusqu'au microprocesseur.
Bobine de fil d'étain 

L'étain est l'élément chimique de numéro atomique 50, de symbole Sn (du latin stannum). C'est un métal pauvre du groupe 14 du tableau périodique. Il existe dix isotopes stables de l'étain, principalement ceux de masses 120, 118 et 116.
L'étain existe aux états d'oxydation 0, +II et +IV. À température ambiante le corps simple étain est un solide métallique.
L'étain est connu depuis l'antiquité où il servait à protéger la vaisselle de l'oxydation et pour préparer le bronze. Il est toujours utilisé pour cet usage, et pour le brasage. Cet élément est peu toxique. Rare à l'état natif, l'étain est essentiellement extrait d'un minéral appelé cassitérite où il se trouve sous forme d'oxyde SnO2. Servomoteur 

Un servomoteur (couramment appelé "servo" du latin "servus" signifiant "esclave") est un moteur capable de maintenir une opposition à un effort statique et dont la position est vérifiée en continu et corrigée en fonction de la mesure.
Potentiomètre 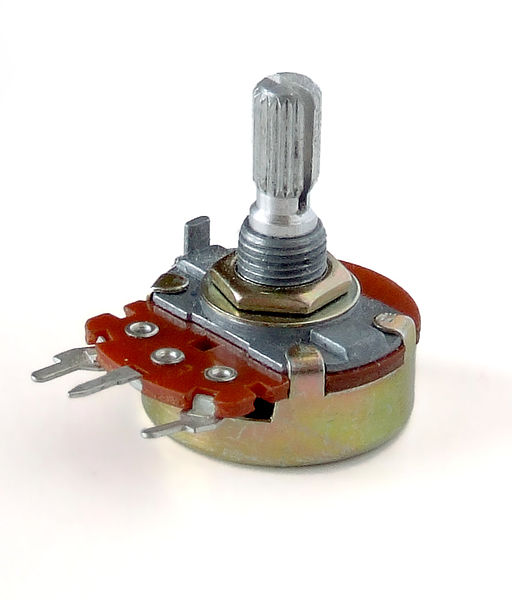

Un potentiomètre est un type de résistance variable à trois bornes, dont une est reliée à un curseur se déplaçant sur une piste résistante terminée par les deux autres bornes.
Arduino Uno 

Arduino, et son synonyme Genuino sont des micro-controleurs libres.
Étape 1 - Réaliser

Étape 2 - Relier
Le 5V de la carte arduino à la breadboard afin de créer plus de broches (il en faut une par servomoteurs et une par potentiomètre)
Étape 3 -
- Un des GND de la carte à une autre ligne de la breadboard (il en faut également un par servomoteurs et un par potentiomètre)
Étape 4 -
- Un des servomoteurs à la broche 9
Étape 5 -
- L'autre à la broche 6
Étape 6 -
- Un des potentiomètres à la broche A0
Étape 7 -
- L'autre à la broche A1
On colle ensuite un servomoteur d'un côté du support et le second de l'autre côté (par exemple avec du double face ou avec de la colle).
le code :
#include <Servo.h> //on ajoute la librairie pour piloter les servomoteurs //On créé 2 objets de type servo Servo gauche; Servo droite; //On créé 2 variables qui représente les broches où sont reliées les potentiomètres int potpin = 0; int potpin2 = 1; //On créé 2 variables où seront stockées les valeurs reçues des potentiomètres int val2; int val; void setup() {
gauche.attach(9); //On lie le servo nommé "gauche" avec la broche 9 droite.attach(6); //On lie le second avec la broche 6
} void loop() {
//On lit les valeurs des ponteiomètres
val = analogRead(potpin); val2 = analogRead(potpin2);
//On "map" les variables : le potentiomètre renvoie une valeur entre 0 et 1023 or le servo //Ne "comprend" que les valeurs comprises entre 0 et 180 : on fait donc un changement //D'intervale
val2 = map(val2, 0, 1023, 0, 179); val = map(val, 0, 1023, 0, 179);
//On applique ensuite ces valeurs aux servomoteurs
droite.write(val2); gauche.write(val);
//On fait une "pause" pour ne pas surcharger la carte arduino
delay(20);
Étape 8 - Que voit-on
Explication ci-dessous


Comment ça marche ?
Observations : que voit-on ?
On voit que si l'on tourne les potentiomètres, les servomoteurs tournent également : cela permet de refermer les servomoteurs pour former une pince capable d'attraper des objets.
Explications
Les potentiomètres sont des résistances variables quand on les tourne : elles permettent de bloquer plus ou moins fortement le courant et ainsi de renvoyer à la carte arduino une valeur qui varie selon le courant qui passe. Cette valeur varie généralement (pour arduino) de 0 à 1023, on utilise alors la fonction map afin de passer de l'intervalle 0-1023 à 0-180, angles selon lesquels le servomoteur peut tourner.
Il suffit ensuite de faire tourner les servomoteurs l'un vers l'autre pour former une pince s'actionnant à l'aide des potentiomètres.
Applications : dans la vie de tous les jours
Cela peut faire une approche pour un sujet traitant de la robotique : on voit souvent des pinces dans les labo et autres.
Dernière modification 12/12/2020 par user:Antonydbzh.
Draft